博文
[转载]直播回顾 | 自动驾驶前沿论坛
|||
直播回顾 | 自动驾驶前沿论坛
2021年3月30日,《中国图象图形学报》为各位图粉精心策划了一场直播活动——自动驾驶前沿论坛,本次活动由中国人工智能学会智能驾驶专委会和智车科技协作组织,并得到了图粉们的大力支持!
论坛邀请到中科院自动化所王飞跃研究员,北京航天航空大学邓伟文教授,全国汽车行业生产力促进中心王羽高级工程师带来精彩报告,由中山大学陈龙教授担任主持人。
论坛Panel环节还邀请到两位青年学者:南京大学冯洋助理研究员和鹏城实验室李轩助理研究员,就直播现场观众提出的问题进行讨论和答疑。今天图图一次性带来3场报告的视频回放和内容回顾~~快来收藏和分享吧。
“自动驾驶技术与应用”专刊

前沿|“自动驾驶技术与应用”专刊正式上线!
1 特邀报告

王飞跃,中科院自动化所研究员
《中国图象图形学报》编委
报告题目:自主无人车如何智能?从平行视觉到平行驾驶
王飞跃老师的报告主要从以下3方面展开:智能时代与平行系统、感知智能与平行视觉、平行物流与平行驾驶。
回放视频

内容回顾
AlphaGo技术的出现,让世人猛然意识到了人工智能的威力,也为我们带来了“AlphaGo命题”。“AlphaGo命题”的核心有3点:
1. 平行哲学,虚实平行互动、纠缠相交的一体化过程;
2. 范式转移,从“大定律、小数据”的牛顿范式向“大数据、小定律”的默顿范式转移;
3. 数据智能,“小数据—大数据—深智能”的过程将是智能产业的标准流程。
从而带来“三个三”“五个五”的智能时代大趋势,IT不再是信息技术,而是“新IT”—智能技术。基于CPSS的平行智能机可将三个世界打通,由此形成“五力合一”,即“数据之力”、“计算之力”、“算法之力”、“网络之力”,最后加上“区块链之力”。

在这一时代大背景之下,平行视觉、平行驾驶、平行控制、平行学习、平行智能等技术应运而生。

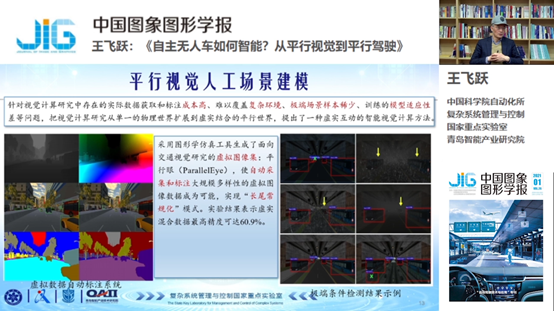
平行视觉是感知智能的新趋势,用于解决视觉计算研究中存在的实际数据获取和标注成本高、难以覆盖复杂环境、极端场景样本稀少、训练的模型适应性差等问题。平行视觉把视觉计算研究从单一的物理世界扩展到虚实结合的平行世界,目标是实现一种“长尾常规化”模式,通过人工虚拟场景来仿真模拟复杂挑战的实际场景,利用计算实验进行视觉模型的训练与评估,最后借助虚实互动的平行执行实现视觉模型的在线优化,这个过程反复闭环迭代,最终实现视觉系统对复杂环境的智能感知与理解,真正走向实际应用。


平行驾驶建立了汽车智能与自动化的统一方案,将自动驾驶、传统网联驾驶、平行智能技术整合在一起,通过在人工世界中获取大量数据、训练模型、所有车辆共享数据经验,从而引导物理世界的实时反应,这一理念,加上平行测试和平行视觉技术的支持,已在长达十二年之久的“中国智能车未来挑战赛”中得到了成功的实践,这一技术还支撑了全球首套极寒条件220吨矿用车无人驾驶编组。

最后,王飞跃老师提出,以“新IT”智能技术为代表的智能科技将开创开发人工世界的新纪元。平行智能将人们的常规思维对象从系统和平台引向生态体系,将3个世界的自然生态、社会生态、知识生态融合一体,走向虚实互动的平行生态,把人类发展推向“6S”新境地:物理世界安全Safety,网络世界安全Security,整体发展可持续Sustainability,保障隐私和个性化个体发展的Sensitivity,全面服务的Service,智慧社会的Smartness。
推荐阅读
李轩, 王飞跃. 2021. 面向智能驾驶的平行视觉感知:基本概念、框架与应用. 中国图象图形学报, 26(1): 67-81
张慧, 李轩, 王飞跃. 2021. 平行视觉的基本框架与关键算法. 中国图象图形学报, 26(1): 82-92
2 特邀报告

邓伟文,北京航空航天大学教授
《中国图象图形学报》编委
报告题目:汽车智能驾驶的关键技术与挑战
汽车智能驾驶集汽车技术、电子信息和人工智能等诸多高新技术于一体,代表着汽车技术和智能产业发展的世界性趋势。邓伟文老师的报告主要就汽车智能驾驶面临的人机交互和行驶环境等主要挑战,以及应对挑战的人机共驾、场景构建、仿真测试等关键技术展开讨论并分享研究心得。
回放视频

内容回顾
汽车智能网联化是一场颠覆汽车的技术革命,目前汽车智能化面临着诸多挑战:包括社会挑战、安全挑战、法律挑战、人因挑战、标准挑战和技术挑战。

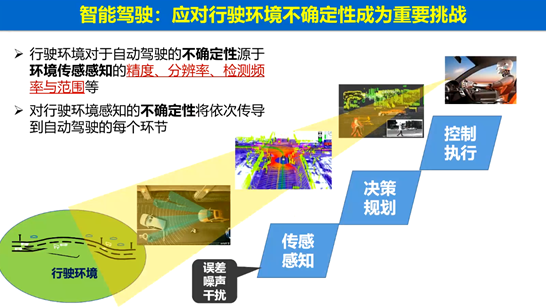
而如何应对行驶环境中的不确定性又是智能驾驶技术中的关键问题,其原因主要为环境传感感知的精度、分辨率、检测频率与范围等。因此也会将误差噪声和干扰通过传感感知依次传导到自动驾驶的每个环节。
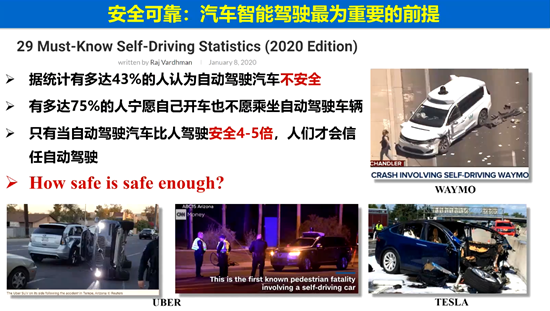
很多数据表明人们对自动驾驶安全可靠性的预期甚至要高于传统汽车。因此如何保证安全,什么程度的安全才足够安全等成为了汽车自动驾驶产业化面临的重要问题,也因此亟需创新的测试方法和工具。
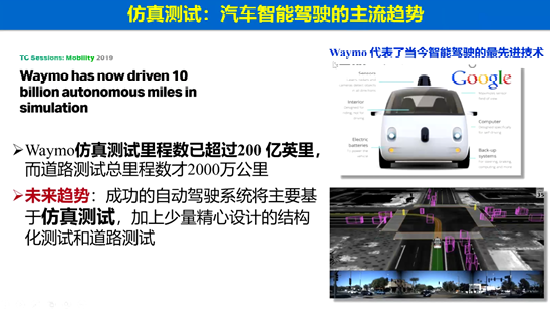
邓伟文老师提到,Google Waymo代表了当前智能驾驶的最先进技术,其仿真测试里程数已超过200亿英里,但其道路测试总里程数才2000万公里,不在一个量级上。因此未来的趋势将主要依赖于仿真测试,加上少量的结构化测试和道路测试。
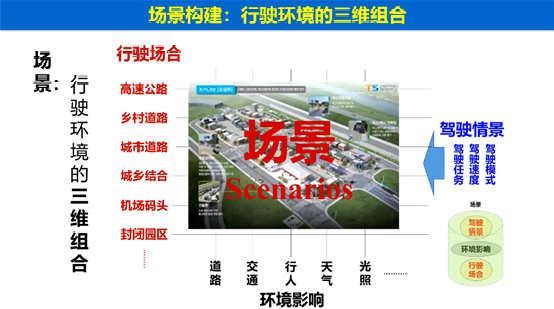
仿真测试是通过计算机构建行驶的场景,包括交通、道路、天气、光照、车辆及环境传感器,使得我们可以把真实世界很逼真地在计算机上复现。模拟仿真技术实际就是希望构建车辆模型和传感器模型等,来支撑智能驾驶算法/软硬件系统的测试、验证和评价。

邓老师具体从汽车智能驾驶测试的场景构建、图像模拟和仿真平台3个方面进行报告。
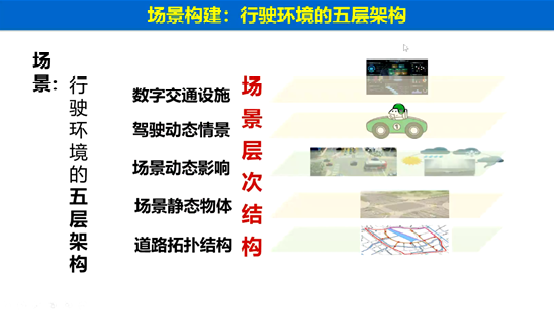
在场景构建部分,邓老师介绍了汽车行驶环境的三维组合、四维映射和五层架构等内容。

在图像模拟部分,邓老师主要介绍了面向机器学习/目标检测的模拟图像生成方法,并建立了模拟图像数据集,与KITTI数据库进行深度学习模型训练的对比实验,在长春快速路上进行了模型泛化能力的测试。最终,用模拟数据训练的模型测试检测的精度和基于真实KITTI数据的精度相差并不大。

最后,邓老师介绍了面向汽车自动驾驶技术与产品的一体化仿真与测试平台PanoSim,集高精度车辆动力学模型、高逼真汽车行驶环境与交通模型、车载环境传感器模型和丰富的测试场景于一体,支持与Matlab/Simulink联合无缝仿真,提供包括离线仿真、实时硬件在环仿真(MIL/SIL/HIL/VIL)和驾驶模拟器等在内的一体化解决方案;支持包括ADAS和自动驾驶环境感知、决策规划与控制执行等在内的算法研发与测试。
官方网站:http://www.panosim.com/cn/

推荐阅读
任秉韬, 邓伟文, 白雪松, 李江坤, 纵瑞雪, 朱冰, 丁娟. 2021. 面向智能驾驶测试的仿真场景构建技术综述. 中国图象图形学报, 26(1): 1-12
3 特邀报告

王羽,全国汽车行业生产力促进中心主任
报告题目:智能驾驶汽车赛事的科技验证研究
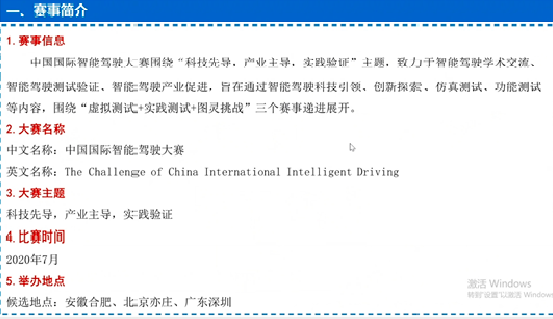
科技竞赛是科技的有效测试验证方法,国内外的智能驾驶赛事不仅有效促进了智能驾驶科技的发展,更是培养了智能驾驶科技企业的一群卓越的企业领袖和工程师精英,王羽老师的报告介绍了国内外智能科技赛事发展情况,并就中国国际智能驾驶大赛的先进性和科技引领性进行详细介绍和分析。
回放视频

内容回顾
报告介绍了中国自动驾驶领域5大赛事的历史、发展现状和商业化进程的突破:
中国智能车未来挑战赛
中国智能汽车大赛
世界智能驾驶挑战赛
i-VISTA自动驾驶汽车挑战赛
中国长春(国际)无人驾驶汽车冰雪挑战赛





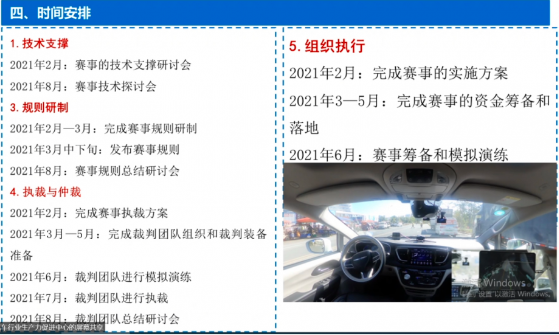
并详细介绍了2021年中国国际智能驾驶大赛的基本方案,欢迎大家点击详细视频了解大赛情况:
推荐阅读
引用格式:冯洋, 夏志龙, 郭安, 陈振宇. 2021. 自动驾驶软件测试技术研究综述. 中国图象图形学报, 26(1): 13-27
4 直播互动获奖名单
获奖网友微信名:唐志、叶同学、孟鑫、孔同学辉、王继荣、郭同学、Albert、吴同学、走你正能量、way, no way 、树、 小赵同学、东南、张同学、旺祺、Hello,常先笙、The Charge
本期奖品为《中国图象图形学报》2021年1月“自动驾驶技术与应用”专刊珍藏版,请以上获奖网友联系学报编辑提供邮寄信息。
编辑:秀 秀
指导:梧桐君
总编辑:肖 亮
https://m.sciencenet.cn/blog-2374-1283051.html
上一篇:[转载]【重要通知】中国自动化学会关于征集2021重大产业与技术问题的通知
下一篇:基于复杂系统理论的平行城市模型架构与计算方法