博文
《激光与光电子学进展》2022年第22期封面故事:层叠相位重建,高分辨、快收敛的相干衍射成像技术
|
层叠相位重建:高分辨、快收敛的相干衍射成像技术
中国科学院上海光学精密机械研究所高功率激光物理联合实验室朱健强研究员、刘诚研究员、潘兴臣副研究员课题组的特邀综述“相干衍射成像技术的最新进展:层叠相位重建技术”被选为《激光与光电子学进展》2022年第22期的封面文章。
论文总结了层叠相位重建技术提出的背景和核心原理,同时总结了近些年该类算法的主要技术突破,并对将来可能的技术突破点和所面临的挑战进行了讨论。

封面解读
本封面展示了层叠相位重建技术的基本光路,当待测样品以小于照明光束直径的步长在垂直于光轴的平面内进行二维移动时,利用每次扫描的光强图和迭代算法,重建待测样品和照明光场的复振幅分布,进而得到待测样品和照明光场的三维时空信息。
文章链接
潘兴臣, 刘诚, 肖伟刚, 朱健强. 相干衍射成像技术的最新进展:层叠相位重建技术[J]. 激光与光电子学进展, 2022, 59(22): 2200001
研究背景
随着计算机硬件的快速发展, 2004年提出的Ptychography技术解决了传统相干衍射成像(CDI)技术的收敛性问题。Ptychography技术即在垂直于光轴的平面内,对待测样品进行部分重叠的二维扫描,并记录多幅光斑,通过类Wegener滤波的更新公式实现对待测样品和照明光场的快速重建。
目前,Ptychography技术作为标准的成像技术,已经广泛应用于X射线和电子束成像领域,同时逐渐拓展到紫外、可见光、和红外等波段,是一种收敛速度快、抗噪能力强、适用范围广泛、能够达到甚至超越衍射极限分辨率能力的高精度相位成像新技术。
Ptychography基本算法

图1 (a) PIE的光路示意图;(b)迭代流程示意图
Ptychography技术的核心算法是PIE (Ptychographic Iterative Engine) 算法,其基本光路如图1(a)所示。以四个扫描位置为例,其迭代过程如图1(b)所示,中心方框表示待测物体,四个圆圈表示连续四次扫描的照明区域,待测样品的出射光复振幅分布为照明光和待测物体透过率函数的乘积,对待测物体复振幅透过率进行随机初始猜测后,基本迭代过程为:
1)依次选取第j个扫描位置,数值计算此时在探测器面的衍射光场复振幅(衍射距离L),该复振幅为衍射光场的估计值;
2)利用探测器实际记录的光强开根号替代上述估计值的振幅,但保持相位不变,得到修正后的衍射光场;
3)逆向数值传播修正后的衍射光场到达待测物体面,得到修正后的待测物体出射光光场复振幅;
4)按照特定的更新公式消除照明光的影响,修正待测物体的复振幅透过率矩阵,并将该矩阵作为第j+1个扫描位置的初始输入;
5)选取第j+1个扫描位置,重复步骤1)-4),每次迭代的输出都是下一次迭代的输入,直到重建误差满足需求。
PIE主要面临的技术难点
1. 照明光分布未知

图2 (a)ePIE重建样品和照明光(插图)的振幅分布; (b) ePIE重建样品和照明光(插图)的相位分布
标准PIE算法假设照明光分布精确已知,但实际很难实现该假设。基于PIE提出的ePIE算法(extended PIE)可以实现在照明光分布未知时,物体的精确恢复,且可以同时恢复出照明光分布,因此基于ePIE算法的Ptychography也可以用于光场诊断。图2为利用ePIE得到的照明光和待测物体的复振幅分布。
2. 扫描误差

图3 位置误差修正前(a)和修正后(b)的振幅分布
位置修正算法可以修正位移台扫描位置误差,常见的有基于退火的位置修正算法和基于重叠区域内物体结构互相关系数最大化的相关算法。图3为采用相关算法修正前后的结果对比。
3. 待测样品厚度
当样品厚度不可忽略时,需要将待测物体按照一定厚度进行虚拟切片,每一层切片的复振幅都未知,且每一层切片的照明光为上层切片出射光的衍射光,采用多层ePIE算法(如3PIE和3D PIE)可以实现对厚样品的恢复,实现3D分层的成像效果。图4为多层Ptychography层析重建结果。

图4 3PIE层析重建结果。(a)样品特定旋转角度下的相位投影,(b)重建结果的y-z截面,(c)和(d)分别为红线和绿线下的x-z截面,(e)三维重建样品渲染图
4. 部分相干性
CDI算法假设光源为完全相干光,为解决部分相干条件下的光场恢复,可以采用混合态的PIE算法,即认为照明光由多个非相干光场模式组成,实际记录的衍射光场强度为N个非相干模式衍射光场强度的叠加,衍射光斑更新时,按照计算出来的能量比分配光强值。

图5 相干模态(a)和独立模态(b)传递函数的重建结果
5.长数据记录时间问题

图6 基于小孔阵列(a)和光栅(b)的单次曝光PIE
多次扫描获得强收敛性的同时,也带来了扫描时间过长的问题,在扫描过程中待测物体分布可能发生变化,因此需要降低扫描时间以保证在测量稳定时间内完成扫描。典型的方案有基于小孔阵列的单次曝光PIE算法和基于光栅分束的ePIE算法。这类方案是将多次扫描的光斑合并到一个衍射光斑中,将衍射光斑空域分割后采用标准PIE算法进行恢复,虽实现了单次曝光,但却牺牲了部分空间分辨能力。
应用
1. X射线成像

图7 (a) SXDM的典型应用结果. (b) PXCT 的三维应用结果. (c) SXDM 波前诊断
基于Ptychography的相干衍射成像技术(PCDI)可以实现2D生物样品成像,结合Ptychography和计算断层扫描成像(PXCT)可以实现高精度断层扫描成像,还可以用于X射线光谱分析、波前诊断和X射线光学元件精密检测等,Ptychography可作为X射线成像领域中的基础成像方法。
2.电子束相位成像

图8 利用Ptychography重建MoS2中的单原子缺陷图
基于Ptychography的电子显微成像技术理论上可以获得衍射极限分辨率,同时Ptychography的光路结构能够兼容传统的像差矫正透射型电子显微镜(TEM)。Ptychography电子显微镜最重要的应用就是研究原子结构,在不改变TEM测量光路的情况下可获得原子量级分辨成像而不需要高质量电子束成像透镜。
3.其它波段

图7 超表面驱动的OLED显示屏。(a)meta-OLED示意图;(b)meta-OLED电致发光的光谱(c)meta-OLED的电镜图及其电致发光图;(d)随像素尺寸大小变化的meta-OLED电致发光图
只要光源是相干或者部分相干的,Ptychography理论上适合全波段,能够解决各领域中的空域光场诊断、相位成像、光学元件精密诊断和时域超快测量等问题。目前,Ptychography技术已被用于高功率激光驱动器领域中的光场诊断(351 nm、526.5 nm、1053 nm)、大口径大相位梯度光学元件检测(632.8 nm)。除此之外,结合显微成像技术出现了可突破显微镜数值孔径的傅里叶Ptychography相位显微镜(FPM);结合超快激光时域测量需求出现了具有最快的收敛速度和最高的重建精确度的PCGPA算法等。
总结与展望
用于层叠相位重建技术的PIE算法具有视场无限、分辨率高、收敛速度快、抗噪声能力强等优点,已被广泛应用于X射线和电子束成像、生物医学成像、高功率激光和光学元件的波前测量等领域。PIE算法在不同领域面临的主要困难是不同的,例如X射线成像要重点关注光源的相干性和稳定性;应用于电子束成像时,则要关注辐射损伤、滞后效应,以及高信噪比的单次测量;可见光领域面临的主要问题是如何提升单次曝光下的信噪比。因此,我们需要针对不同领域制定具体的解决方案。此外,基于Ptychography 的重建算法在超快激光脉冲测量和傅里叶显微术中也得到了广泛的应用。

图8 DUV光刻技术制备大面积超表面
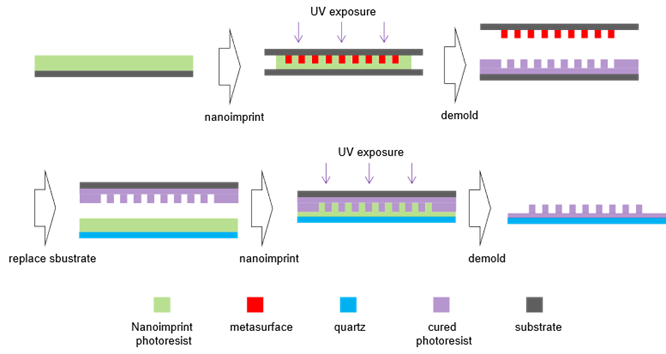
图9 超表面的批量制造纳米压印工艺
高功率激光物理联合实验室介绍
为更好推进我国激光惯性约束聚变(ICF)研究事业,1986年,中科院上海光学精密机械研究所和中国工程物理研究院成立“高功率激光物理联合实验室”。
联合实验室面向国家战略,发展激光驱动器应用基础、关键技术、系统集成,以及高能量密度物理的创新与探索性研究,从事激光驱动器装置研发及高效高质量维护运行,开展国际合作与学术交流,培养科学研究与工程技术人才,坚持自主创新与可持续性发展,引领我国激光驱动器的科学发展与技术进步。
其中,国内首创的神光Ⅰ激光装置实现多项自主创新技术,于1990年荣获国家科技进步一等奖;神光Ⅱ大型高功率激光系统装置是我国国内首台千焦耳级大型高功率激光装置,于2005年荣获国家科技进步二等奖;神光Ⅱ多功能高能激光装置挑战了多项激光技术物理极限,是目前我国唯一可为物理实验提供探针光的高能激光装置,于2013年荣获国家科技进步二等奖;高能皮秒拍瓦激光系统项目荣获2018年度上海市科技进步奖一等奖。
https://m.sciencenet.cn/blog-3233766-1368584.html
上一篇:《中国激光》2022年第22期封面故事(一):高速并行的双光子激光直写技术
下一篇:《激光与光电子学进展》2022年第23期封面故事:碘分子调制转移谱与光学腔结合,破解激光稳频局限的“黑科技”