博文
欺骗攻击下具备隐私保护的多智能体系统均值趋同控制
|
引用本文
应晨铎, 伍益明, 徐明, 郑宁, 何熊熊. 欺骗攻击下具备隐私保护的多智能体系统均值趋同控制. 自动化学报, 2023, 49(2): 425−436 doi: 10.16383/j.aas.c210889
Ying Chen-Duo, Wu Yi-Ming, Xu Ming, Zheng Ning, He Xiong-Xiong. Privacy-preserving average consensus control formulti-agent systems under deception attacks. Acta Automatica Sinica, 2023, 49(2): 425−436 doi: 10.16383/j.aas.c210889
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c210889
关键词
多智能体系统,均值趋同,欺骗攻击,隐私保护,网络安全
摘要
针对通信网络遭受欺骗攻击的离散时间多智能体系统, 研究其均值趋同和隐私保护问题. 首先, 考虑链路信道存在窃听者的情形, 提出一种基于状态分解思想的分布式网络节点值重构方法, 以阻止系统初始信息的泄露. 其次, 针对所构建的欺骗攻击模型, 利用重构后节点状态信息并结合现有的安全接受广播算法, 提出一种适用于无向通信网络的多智能体系统均值趋同控制方法. 理论分析表明, 该方法能够有效保护节点初始状态信息的隐私, 并能消除链路中欺骗攻击的影响, 实现分布式系统中所有节点以初始值均值趋同. 最后, 通过数值仿真实验验证了该方法的有效性.
文章导读
随着技术的进步与时代的发展, 人工智能已然成为当前自动化研究领域的一片广阔热土. 其中分布式人工智能则是未来人工智能发展的趋势之一. 多智能体系统作为分布式人工智能的重要实现应用, 其已成为许多复杂人工智能系统的核心技术[1]. 多智能体系统是由多个具有一定感知、计算、执行和通信能力的智能个体组成的网络系统[2]. 目前, 多智能体系统已经被广泛应用于与日常生活及工业生产息息相关的领域, 例如: 无人机协同编队[3]、智能城市交通[1]、智能电网[4]等. 趋同问题作为多智能体系统分布式协作控制领域中最基础的研究方向之一, 是指在没有控制中心的情况下, 系统中每个智能体(或节点)仅使用邻居间相互广播的状态信息, 将智能体动力学方程与通信网络拓扑耦合成复杂网络, 并使用合适的分布式控制算法, 从而在有限时间内实现所有智能体状态值的一致或同步.
然而, 由于多智能体系统所具有的开放式网络环境、通信渠道种类单一、节点同构性高且单个节点资源有限等特性, 使得网络中通讯链路容易被恶意第三方窃听或破坏. 因此如何在恶意网络环境下实现节点之间状态信息的隐私保护和精准趋同, 已成为多智能体系统研究的新挑战. 具体地, 多智能体系统趋同控制在实际应用中面临两个关键问题: 1)节点自身初始状态信息的隐私泄露问题; 2)节点间的通信链路可能会遭受网络攻击的问题, 如拒绝服务(Denial-of-service, DoS)攻击、欺骗攻击等.
在过去10年, 已有较多研究人员针对节点初始状态值的隐私问题开展相关的研究工作. 研究的目标是在确保多智能体系统趋同的基础上, 避免网络中节点的状态值隐私泄露. 一方面, 有研究人员针对迭代趋同问题提出了一种差分隐私迭代同步趋同机制[5]. 但是采用差分隐私机制所带来的收敛状态与期望状态不精确一致问题无法避免. 随后, 使用差分隐私机制并针对不同等级隐私需求的分布式趋同方法被提出[6-8]. 这类方法的基本思想是在信息交互过程中用零和随机噪声掩盖真实状态值, 通过精心设计噪声插入过程实现趋同并保护节点隐私. 其次, 有学者针对均值趋同问题提出了一种添加伪随机偏移量的隐私保护方法[9], 它克服了使用差分隐私机制导致的精度下降的不足. 此外, 有学者研究利用可观测性的概念, 结合图论和优化工具来保护节点隐私[10-12]. 这类方法的本质是通过调整网络拓扑中的链路权重以减小窃听者推算被窃听节点的观测能力, 从而保护节点的隐私. 另一方面, 部分研究人员开始将目光投向逐步应用的同态加密技术. 同态加密技术在文献[13-14]中被应用于计算加密域的趋同. 网络中每个节点仅能获得其他节点交互的加密值, 因此节点的状态值是保密的. 但是同态加密技术也有不足之处, 它的计算复杂度非常大导致资源开销显著增加. 为了摆脱使用同态加密技术所带来的限制, 有学者将安全多方计算中的方法融入到分布式趋同控制系统中, 例如: 基于加性秘密共享的隐私保护均值趋同算法[15], 以及基于Shamir秘密共享的隐私保护异步均值算法[16]等. 这类基于秘密共享的隐私保护方法虽然减少了计算和通信消耗, 但仍不适用于单个智能体计算和通信资源有限的分布式多智能体系统. 最近, Wang[17]提出了一种基于状态分解的隐私保护均值趋同机制, 主要思想是将每个节点的初始状态分解为两个随机状态值子状态, 让一个子状态扮演分解前原节点的角色参与邻居节点间的信息交互, 而另一子状态则被隐藏起来仅与第一个子状态通信. 该机制能够使系统达成均值趋同的目标, 并且保护每个节点的初始状态信息不被泄露.
上述的研究成果均假设在安全理想的网络环境下, 即系统不存在网络攻击的前提下得出的. 然而, 在实际应用场景中, 由于智能体的组成部件众多, 组件之间的通信链路和智能体之间的通信链路皆有可能遭受网络攻击, 导致相关的多智能体系统趋同控制方法不再适用, 这使得研究多智能体系统在各种类型的网络攻击下的安全趋同发展迅速, 并产出了大量的研究成果. 目前, 多智能体系统中常见的网络攻击主要有DoS攻击[18-21]和欺骗攻击[22-25]两种形式. 欺骗攻击作为一种典型的网络攻击类型, 在攻击者精心设计的情况下可以巧妙地绕过攻击检测机制的监测, 造成严重的损失. 与DoS攻击相比, 欺骗攻击更难发现, 同时严重影响数据的完整性[26]. 多智能体系统分布式网络可能遭受例如数据重放、数据篡改、虚假数据注入等不同形式的欺骗攻击导致系统不能达成共识状态. 近年来, 学者们从不同的角度入手对欺骗攻击下的多智能体系统趋同问题开展了相关研究并取得了较多的成果. 其中, 有学者提出一种基于后退地平线控制方法的新型分布式弹性算法[22], 解决了攻击者针对控制器−执行器通信渠道重复传送数据的重放式欺骗攻击. 此外, 有学者针对传感器−控制器通信渠道提出了一个新的分布式观测器[23], 通过使用这个观测器来估计相对完整的状态, 然后在反馈协议中使用估计的状态, 最终实现系统在网络攻击下的共识. 同样的, 针对传感器−控制器通道, 有研究者提出了一种分布式安全脉冲控制器[24], 通过引入与每个通信通道相关的随机变量, 实现了存在虚假数据注入形式的欺骗攻击下的趋同.
然而, 上述文献仅考虑隐私保护需求或网络容错功能. 例如, Wang[17]提出的状态分解机制满足了对于节点初始状态值的隐私需求, 但是如果遭受欺骗攻击, 则系统将不能实现预期的均值趋同. 文献[23]提出的重设计观测器能够抵御网络中可能出现的欺骗攻击, 但是若存在一个只窃听交互信息不产生恶意攻击行为的第三方, 网络中节点的隐私就无法保证. 目前, 已有部分同时考虑隐私保护需求和网络容错功能的文献. Li等[27]率先开展了分布式多智能体网络在信道攻击下系统全局一致性的工作, 随后在文献[28]中更进一步地提出在有限资源条件及隐私保护需求下的高效分布式算法. 特别针对分布式系统优化问题, 文献[29]提出了一种时变非平衡有向网络环境下差分隐私随机次梯度推送算法. 2019年, Fiore等[30]进行了欺骗攻击下满足差分隐私需求的多智能体系统弹性趋同研究工作, 但成果仍存在非精确均值趋同、未考虑节点内部通讯链路的安全状况等可以进一步改进和扩展的地方. 随着多智能体系统在关键领域的逐步应用, 如何设计兼顾隐私保护需求和网络容错功能的多智能体系统趋同控制算法成为亟须研究的热点问题, 这也是本文的研究重点.
基于上述研究与总结, 本文主要致力于研究欺骗攻击下保护节点初始值隐私信息的多智能体系统均值趋同问题, 从而完善和补充现有趋同算法的相关研究成果. 本文围绕系统的容错能力开展研究, 不关注检测和处理网络攻击的能力, 而是关注分布式控制算法在网络攻击下完成预期趋同的鲁棒设计实现. 本文主要贡献包括以下3个方面:
1)不同于文献[24-25]对网络攻击的建模, 本文考虑了欺骗攻击在多智能体系统中对不同类型通信链路的攻击特性和发生范围, 提出了广义f-局部攻击模型. 新攻击模型相比于传统攻击模型考虑的场景更面向实际应用, 具有一定的普适性.
2)针对提出的广义f-局部攻击模型欺骗攻击下的无向通信拓扑结构多智能体系统, 提出一种基于状态分解机制的隐私保护与弹性均值趋同控制算法. 相比于文献[17], 本文提出的算法在保证节点初始状态值的隐私基础上进一步实现了网络容错功能. 理论分析证明在一定网络鲁棒性条件下系统可容忍一定数量的通信链路遭受欺骗攻击破坏, 并最终实现均值趋同.
3)相比于文献[24, 26], 本文扩宽了欺骗攻击的抵御范围, 从单一通信链路防御扩展到多类型不同链路的全面防御, 针对不同链路传输的多类型数据的篡改进行相应的处理.
本文内容结构如下: 第1节介绍本文需要用到的图论知识和网络鲁棒性等相关预备知识; 第2节对广义ff-局部攻击模型欺骗攻击进行建模以及给出相关假设, 随后给出引理及其证明; 第3节提出欺骗攻击下具备隐私保护的均值趋同控制算法, 并分别对算法在欺骗攻击下的系统均值趋同以及隐私保护能力进行分析; 第4节通过四组数值仿真实验验证所提算法的有效性; 第5节是总结与展望.
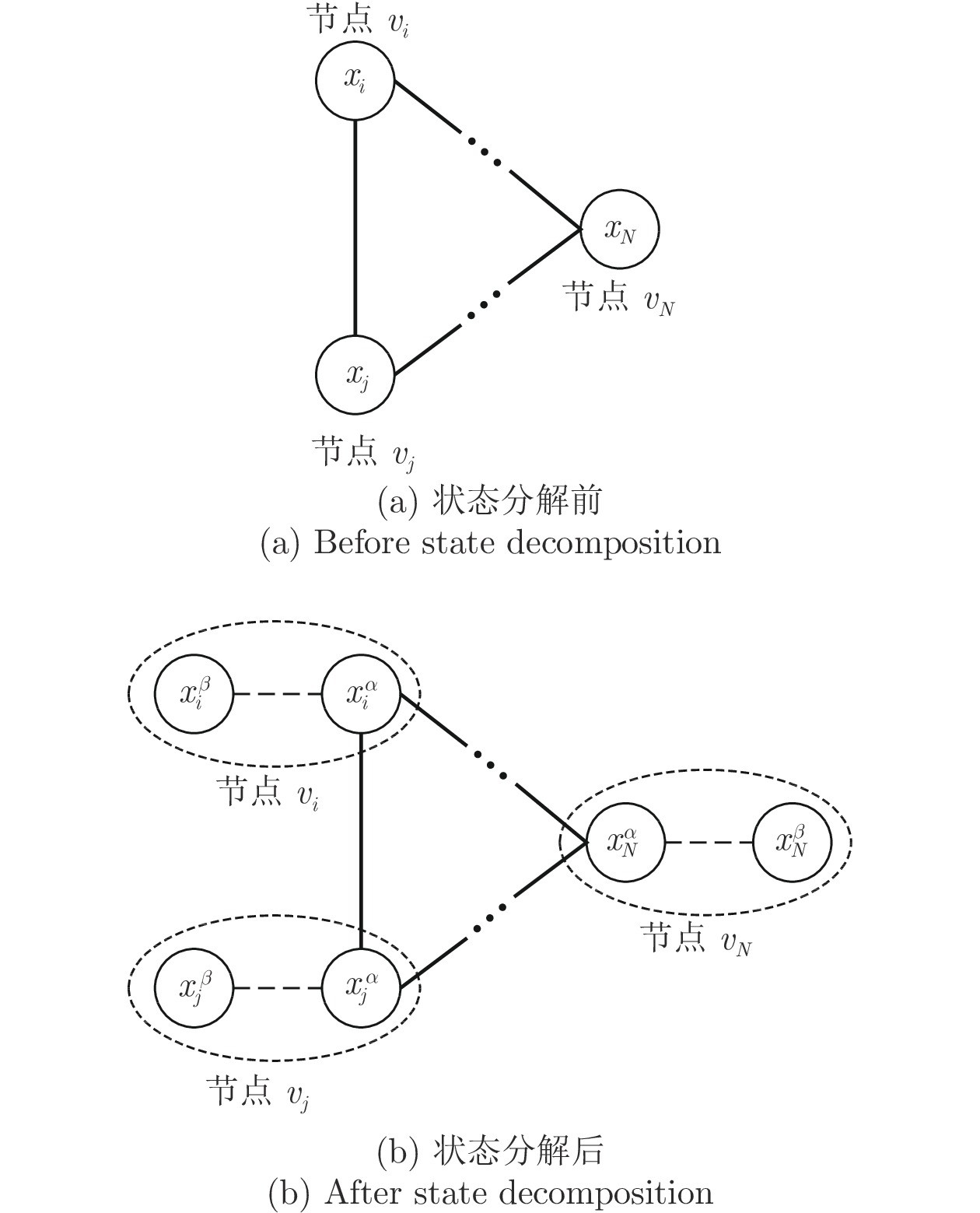
图 1 状态分解方法示例图
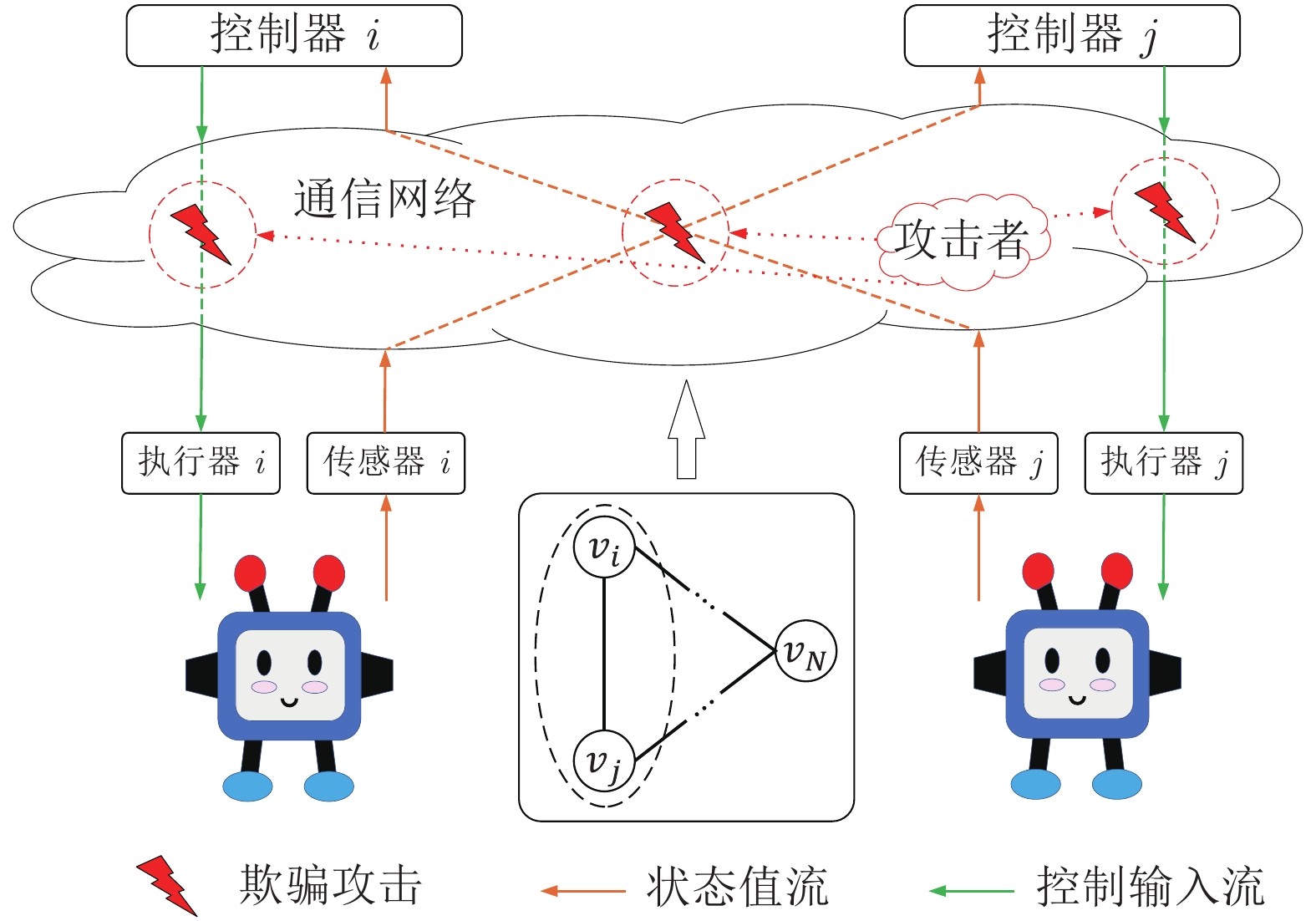
图 2 欺骗攻击下多智能体系统分布式网络示意图
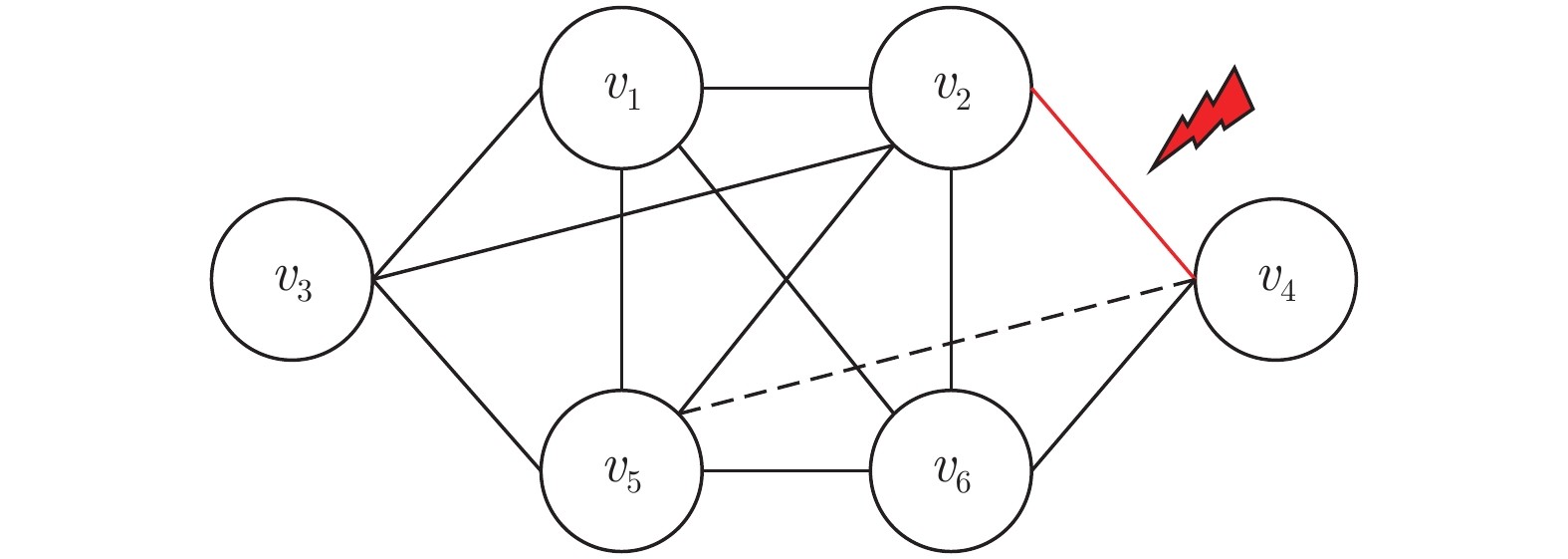
图 3 6个节点组成的多智能体系统通信拓扑图
本文针对欺骗攻击下无向多智能体分布式网络均值趋同问题, 提出了一种具备隐私保护能力的趋同控制算法, 实现了欺骗攻击下多智能体系统分布式网络的均值趋同控制. 首先, 本文对传统的攻击模型进行了拓展提出了广义f-局部攻击模型. 其次, 使用一种改进后的状态分解方法对分布式网络中节点的初始状态值信息进行处理, 经过处理后的系统中所有节点初始状态值得到了隐私保护. 然后, 利用已具备隐私保护特性的节点状态值加以使用安全接受广播算法实现欺骗攻击下的均值趋同, 综合上述方法构造出一种适用于广义f-局部欺骗攻击下无向通信拓扑的多智能体系统均值趋同控制算法. 最后, 通过4组数值仿真实验验证了所提算法的有效性.
然而, 本文提出的控制方法仍存在着不足: 1)所提方法目前仅适用于无向网络, 在实际应用中, 有向网络则更为普遍, 因此接下来的研究将针对有向拓扑图网络对具备隐私保护的均值趋同控制器进行设计; 2)为了抵消欺骗攻击的影响, 本文要求系统网络拓扑图符合强(2f+1)-链路鲁棒图条件, 这在实际应用中实现具有一定难度, 因此如何在放宽通信网络拓扑图鲁棒性要求下仍能有效抵御欺骗攻击的控制器设计将是接下来另一个值得研究的方向. 这些不足, 需要在未来的工作中进一步研究.
作者简介
应晨铎
杭州电子科技大学网络空间安全学院硕士研究生. 2020年获得浙大宁波理工学院软件工程学士学位. 主要研究方向为弹性趋同, 隐私保护和分布式系统安全. E-mail: cdying@hdu.edu.cn
伍益明
杭州电子科技大学网络空间安全学院副教授. 2016年获得浙江工业大学控制科学与工程博士学位. 主要研究方向为分布式系统安全控制, 多智能体系统网络安全和迭代学习控制. 本文通信作者. E-mail: ymwu@hdu.edu.cn
徐明
杭州电子科技大学网络空间安全学院教授. 2004年获得浙江大学博士学位. 主要研究方向为网络信息安全, 数字取证. E-mail: mxu@hdu.edu.cn
郑宁
杭州电子科技大学网络空间安全学院研究员. 1987年获得浙江大学硕士学位. 主要研究方向为信息安全, 信息管理系统和多智能体系统. E-mail: nzheng@hdu.edu.cn
何熊熊
浙江工业大学信息工程学院教授. 1997年获得浙江大学博士学位. 主要研究方向为迭代学习控制, 智能控制及其在多智能体系统和传感器网络中的应用. E-mail: hxx@zjut.edu.cn
https://m.sciencenet.cn/blog-3291369-1381790.html
上一篇:基于单声矢量传声器虚拟扩展的多机动声目标跟踪算法
下一篇:高速动车组数据驱动无模型自适应控制方法