博文
基于高斯–广义双曲混合分布的非线性卡尔曼滤波
|
引用本文
王国庆, 杨春雨, 马磊, 代伟. 基于高斯–广义双曲混合分布的非线性卡尔曼滤波. 自动化学报, 2023, 49(2): 448−460 doi: 10.16383/j.aas.c220400
Wang Guo-Qing, Yang Chun-Yu, Ma Lei, Dai Wei. Nonlinear Kalman filter based on Gaussian-generalized-hyperbolic mixing distribution. Acta Automatica Sinica, 2023, 49(2): 448−460 doi: 10.16383/j.aas.c220400
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c220400
关键词
非线性卡尔曼滤波,高斯–广义双曲分布,非平稳噪声,厚尾分布,变分贝叶斯
摘要
本文研究带非平稳厚尾非高斯量测噪声的非线性系统状态估计问题. 考虑到广义双曲分布包含多种常见厚尾分布特例, 且其混合分布为共轭的广义逆高斯分布, 选用广义双曲分布建模厚尾噪声; 进而引入伯努利变量构建高斯–广义双曲混合分布来建模非平稳厚尾噪声, 并利用该分布的高斯分层结构得到系统的概率模型. 随后采用变分贝叶斯方法实现对系统状态以及噪声参数的后验估计, 得到针对此类噪声系统的卡尔曼滤波 (Kalman filter, KF) 框架, 现有的几种鲁棒滤波算法均是本文算法的特例. 机器人跟踪仿真实验表明, 所提算法与同类算法相比具有更好的估计精度和数值稳定性, 且对于初始参数具有较好的鲁棒性.
文章导读
以卡尔曼滤波 (Kalman filter, KF) 为代表的状态估计算法是信息融合、导航定位、目标跟踪、智能电网等领域的关键技术[1-3]. 经典的KF针对线性高斯系统设计, 能够获得多种统计意义下的最优估计值. 随后KF扩展到非线性系统的状态估计, 代表性算法包括扩展卡尔曼滤波 (Extended KF, EKF)、无迹卡尔曼滤波 (Unscented KF, UKF) 和容积卡尔曼滤波 (Cubature KF, CKF). EKF直接采用一阶泰勒展开将非线性函数线性化, 当非线性程度较强时估计精度和稳定性难以保证. UKF和CKF均是采用确定性采样点来计算非线性积分, 从形式上讲CKF是UKF算法的一种特例, 两者较EKF有更好的估计精度[4]. 以上算法均是针对高斯噪声系统设计, 然而在很多具体应用中传感器噪声会偏离高斯分布. 在室内定位、水声导航、机动目标跟踪、电力系统等应用中[5-8], 经常会出现受到大量野值、干扰等引起传感器具有厚尾特性非高斯噪声的情况. 直接使用这些针对高斯噪声设计的滤波方法会导致估计精度下降甚至算法发散[8].
针对非高斯噪声系统状态估计的经典方法包括利用蒙特卡洛思想的粒子滤波和基于有限高斯分布逼近非高斯噪声的高斯求和滤波算法[6], 由于计算复杂度高, 限制了两者使用范围. 近年来, 针对非高斯噪声系统状态估计算法的研究主要包括基于距离[9]和基于分布[10]两种思路[11]. 基于距离的方法包括基于极大相关熵的滤波算法[12]、基于最小误差熵的滤波算法[5, 13]、基于M估计的滤波算法[9]、基于统计相似度的鲁棒滤波方法[14-15]等. 以基于极大相关熵的滤波算法为例, 此类方法利用相关熵概念替代常用的二范数形式来定义代价函数, 据此求解得到针对线性系统[12]、非线性系统[16-18]和传感器网络系统[19]的各类滤波算法. 此类算法不针对特定类型的非高斯分布, 但是其抑制非高斯噪声的能力与核宽度有关, 且缺乏严格的自适应更新依据, 其估计精度提升有限. 与之类似, 基于最小误差熵和基于M估计的滤波算法均有对估计性能影响显著的参数需要调整, 基于统计相似度的滤波方法需要考虑相似度函数选择的问题. 第二种思路是采用典型的分布来建模常见的厚尾非高斯噪声, 常用的有学生t分布[20-22]、多变量Laplace分布[11, 23]、椭球分布[24-25]等, 一般是利用此类分布的高斯尺度混合表达形式借助变分贝叶斯等方法得到后验估计.
根据中心极限定理, 常见传感器的噪声可以建模为高斯分布, 且在工程实践中一般能满足需求. 但是在特定的场景下传感器不可避免面临各种异常扰动、使用环境变化等引起噪声分布发生改变. 以基于传感器网络的目标跟踪为例, 在开阔的理想场景下, 传感器噪声建模为高斯分布是合适的; 当目标进入室内、森林、地下等复杂场景, 在传感器和目标之间存在干扰、遮挡、折射、多路径等情况下传感器测量误差会增大, 存在大量异常噪声, 此时可以建模为厚尾非高斯分布; 当目标再次进入空旷的环境中, 则可以继续利用高斯噪声假设. 能够适应这种非平稳厚尾非高斯噪声的鲁棒状态估计算法更具有一般的实用价值. 现有的鲁棒状态估计算法理论上能够适应这种变化, 但是很难在两种情况下均取得较好的估计效果. 针对线性系统, 文献[26]和文献[27]考虑将这种噪声建模为高斯–学生t混合分布, 文献[28]进一步考虑了噪声存在偏态的情形, 但是其混合函数的精确后验分布没有给出. 针对非线性系统, 文献[29]中采用了高斯分布和学生t分布来混合建模非平稳厚尾量测噪声, 利用UKF计算非线性积分项, 但是算法没有考虑量测噪声矩阵的变化, 表征高斯分布和厚尾噪声的切换参数也缺乏自适应更新策略.
针对现有方法存在的问题, 需要选择适当的分布保证其既能建模不同厚尾程度的非高斯噪声又能精确得到其后验参数概率密度函数. 此外还需要解决如何自适应更新噪声参数以及切换参数的问题. 考虑到多种常见厚尾分布为广义双曲分布特例且其尺度混合函数为共轭分布的特性[30-32], 本文基于广义双曲分布构建高斯–广义双曲混合分布来研究带非平稳厚尾量测噪声的非线性系统状态估计问题, 通过对超参数选择合适的先验分布并借助变分贝叶斯学习实现参数的自适应更新. 本文主要贡献包括: 1) 通过引入伯努利变量构建高斯–广义双曲混合分布建模非平稳厚尾噪声, 利用广义双曲分布的高斯分层形式建立系统的概率形式模型; 2) 选取合适的先验分布, 利用变分贝叶斯方法实现系统状态、噪声参数以及切换参数后验分布的联合估计, 建立了此类问题的估计框架, 现有的几种鲁棒滤波算法[22-23, 29]均是其特例; 3) 基于传感器网络的机器人目标跟踪仿真实验表明, 本文所提算法与现有方法相比有更好的估计精度和数值稳定性.
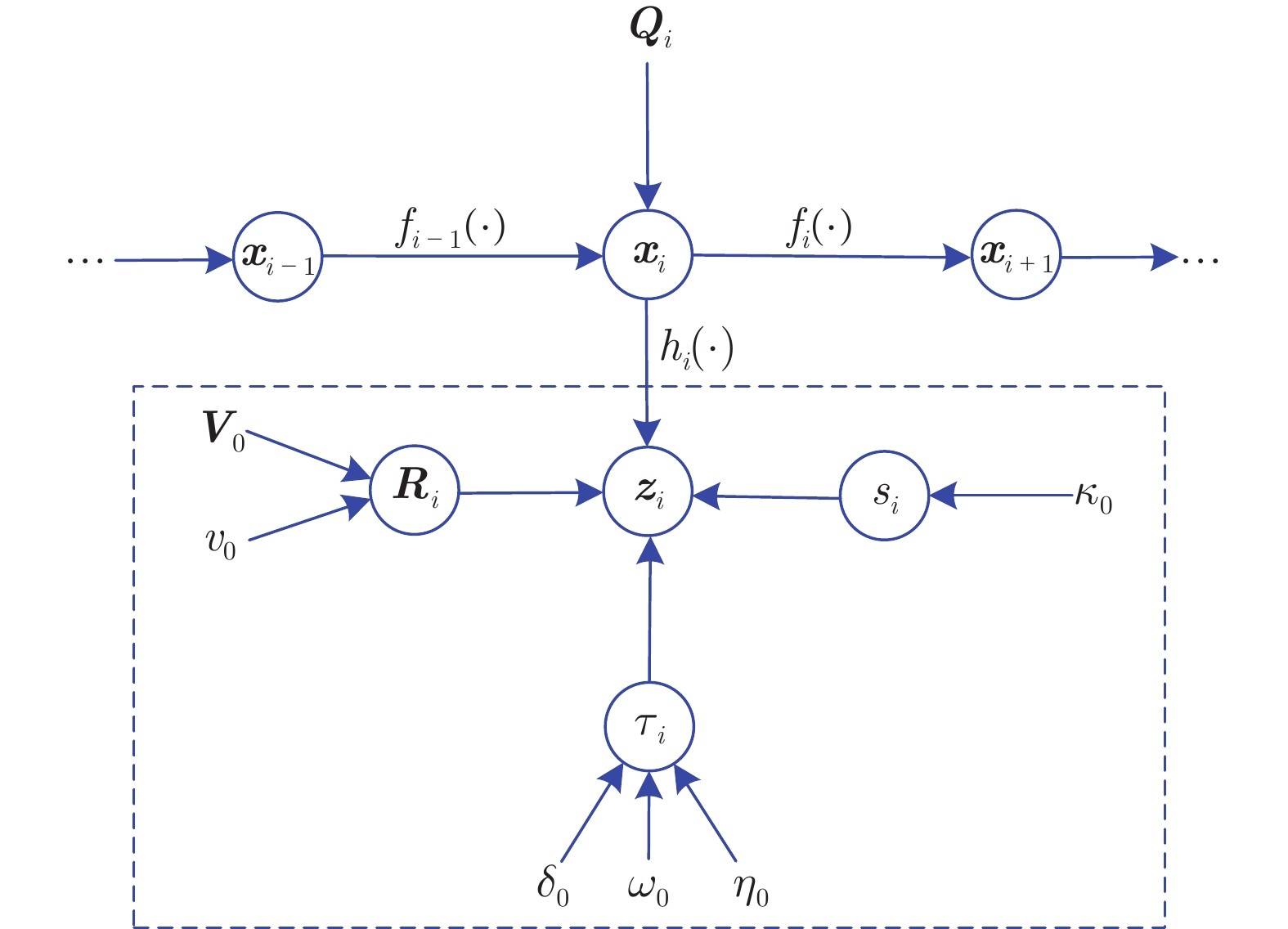
图 1 本文系统的图模型

图 2 基于传感器网络的机器人跟踪示意图
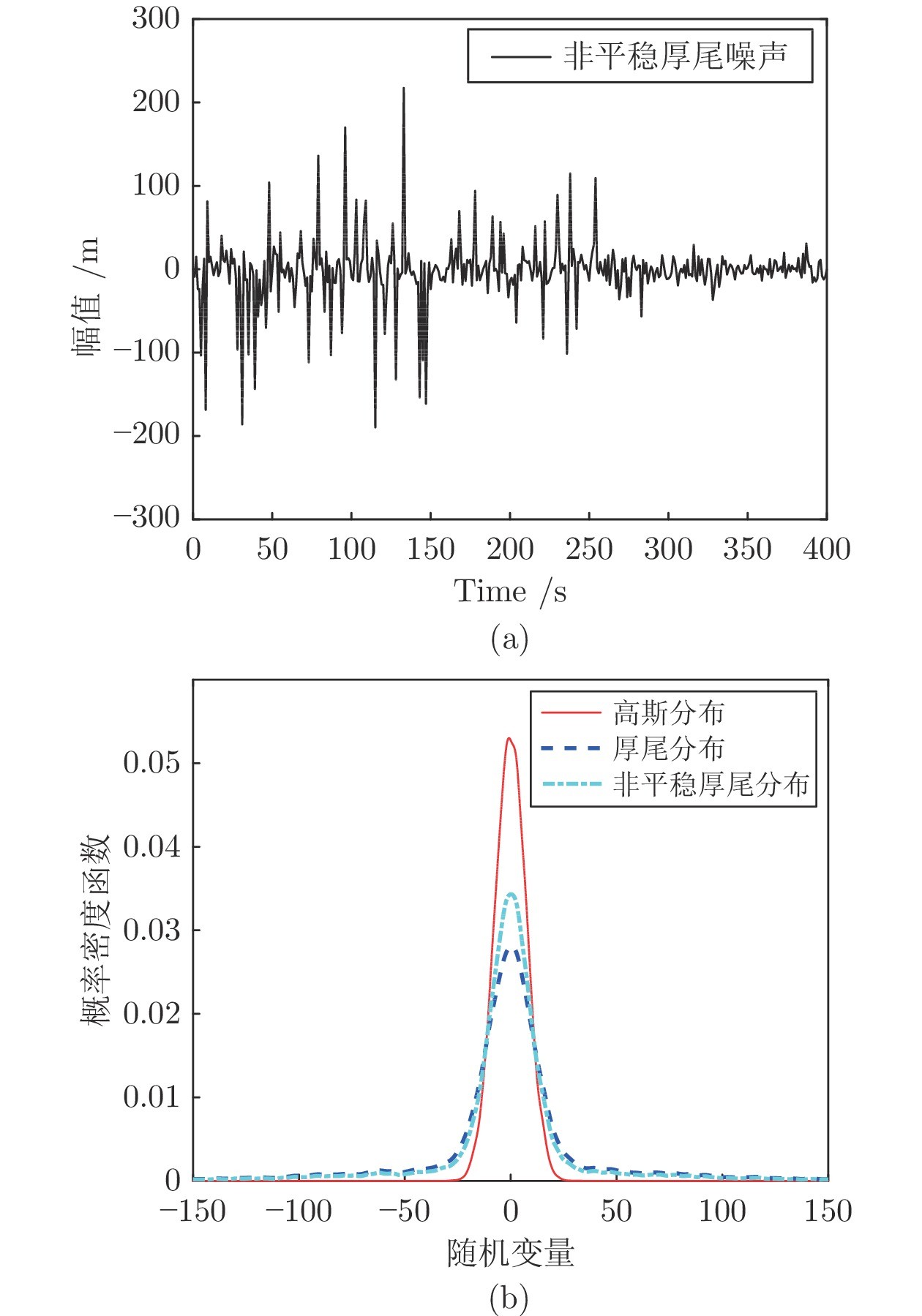
图 3 仿真中产生一维噪声的幅值以及概率密度函数
针对带非平稳厚尾量测噪声非线性系统的状态估计问题, 本文引入高斯–广义双曲混合分布进行噪声建模, 利用变分贝叶斯方法求解其状态以及各种噪声参数的后验分布, 得到了基于高斯–广义双曲混合分布的非线性卡尔曼滤波算法框架. 分析表明, 现有的几种鲁棒 (自适应) 滤波算法均是其特例, 且本文提出的算法框架相比现有方法具有更好的估计精度和数值稳定性. 未来的研究方向包括考虑量测噪声存在偏态、系统噪声也存在非平稳厚尾噪声、分布式的多传感器信息融合等复杂场景.
作者简介
王国庆
中国矿业大学信息与控制工程学院副教授. 分别于2014年和2019年获得中国矿业大学学士学位和哈尔滨工程大学博士学位. 主要研究方向为鲁棒状态估计, 分布式信息融合及其在导航中的应用. E-mail: wangguoqing0632@163.com
杨春雨
中国矿业大学信息与控制工程学院教授. 2009年获得东北大学博士学位. 主要研究方向为奇异摄动系统, 工业过程运行控制, 物理信息系统和鲁棒控制. 本文通信作者. E-mail: chunyuyang@cumt.edu.cn
马磊
中国矿业大学信息与控制工程学院副教授. 2019年获得南京理工大学博士学位. 主要研究方向为奇异摄动系统, 切换系统和网络控制系统. E-mail: maleinjust@126.com
代伟
中国矿业大学信息与控制工程学院教授. 2015年获得东北大学博士学位. 主要研究方向为复杂工业过程建模、优化与控制, 数据挖掘和机器学习. E-mail: weidai@cumt.edu.cn
https://m.sciencenet.cn/blog-3291369-1382017.html
上一篇:高速动车组数据驱动无模型自适应控制方法
下一篇:《自动化学报》创刊60周年专刊|类别增量学习研究进展和性能评价