博文
虚拟未建模动态补偿驱动的双率自适应控制
|
引用本文
杨天皓, 李健, 贾瑶, 刘腾飞, 柴天佑. 虚拟未建模动态补偿驱动的双率自适应控制. 自动化学报, 2018, 44(2): 299-310. doi: 10.16383/j.aas.2018.c160623
YANG Tian-Hao, LI Jian, JIA Yao, LIU Teng-Fei, CHAI Tian-You. Dual-rate Adaptive Control Driven by Virtual Unmodeled Dynamics Compensation in Industrial Heat Exchange Process. ACTA AUTOMATICA SINICA, 2018, 44(2): 299-310. doi: 10.16383/j.aas.2018.c160623
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c160623
关键词
虚拟未建模动态补偿,工业换热过程,区间控制,PI控制
摘要
工业换热过程是蒸汽与循环水在换热器中进行热交换,使供水温度达到工艺规定的目标范围内的复杂工业过程.由于存在蒸汽压力、回水流量波动以及换热器内管壁结垢的扰动,导致被控对象模型参数发生未知随机的大范围变化,使控制器积分作用失效,造成内环蒸汽流量和外环供水温度波动,相互影响,甚至谐振.针对上述问题,利用工业换热过程运行在工作点附近的特点,用确定性低阶线性模型和虚拟未建模动态来描述被控过程.将自适应信号法与双率控制技术相结合,提出了以蒸汽流量为内环输出、以供水温度为外环输出的双率自适应控制器,并给出了该控制器的稳定性和收敛性分析.本文将工业换热过程机理模型作为被控对象,进行了半实物仿真.结果表明,对于工业换热过程,在模型参数大范围变化时,本文提出的控制方法可以将供水温度控制在工艺要求的目标范围内.
文章导读
工业换热过程是蒸汽与循环水在换热器进行热量交换实现热传输介质转换的非线性不确定串级工业过程[1].
对这类被控过程, 文献[2-4]分别提出了模糊滑模控制器、基于PID的设定值优化控制器和模糊逻辑控制器; 文献[5]以蒸汽阀门开度为控制输入, 以蒸汽流量为内环输出, 以供水温度为外环被控输出, 提出了基于状态观测器的反馈串级控制方法.上述方法[2-5]均采用定值控制策略.对于地处温差大的西部的厂区的换热过程, 采用定值控制, 不仅难以避免供水温度的波动, 而且会造成蒸汽流量大范围波动, 使蒸汽阀门频繁动作, 使阀门损坏.
文献[6]将室外温度和回水流量作为可测干扰, 采用前馈串级和规则推理补偿的区间控制方法, 克服了室外温度和热用户放水对供水温度的影响.但是, 该结果没有考虑蒸汽压力波动和换热器内管壁结垢对供水温度的动态影响.蒸汽压力的随机频繁波动会引起模型参数的变化, 使蒸汽流量闭环控制系统处于动态变化之中.工业用水的水质问题会引起换热器内管壁结垢, 使供水温度模型参数发生未知随机变化, 难以采用基于参数辨识的自适应控制方法[7-8].模型参数的未知大范围变化导致供水温度波动, 内外环相互影响, 使供水温度运行在目标范围之外, 甚至发生谐振[9].
本文以中国西部某选矿厂的工业换热过程为被控对象, 将未建模动态、干扰和参数时变等动态特性考虑为虚拟未建模动态.利用前一拍虚拟未建模动态可测的特点, 使用虚拟未建模动态补偿的PI控制方法设计蒸汽流量控制器; 采用提升技术[10]将蒸汽流量内环闭环控制系统的动态特性引入供水温度动态模型; 采用虚拟未建模动态补偿的一步最优PI控制策略设计供水温度控制器.理论分析和半实物仿真实验结果表明, 对于参数变化的工业换热过程, 本文设计的控制器具有自适应能力, 可以使供水温度控制在工艺要求的目标值范围内.
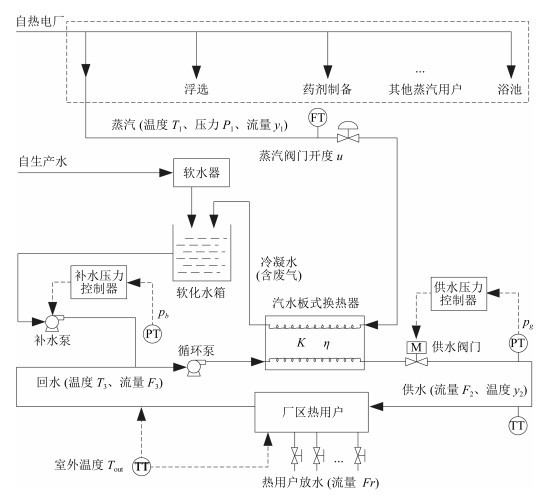
图 1 工业换热过程工艺流程图
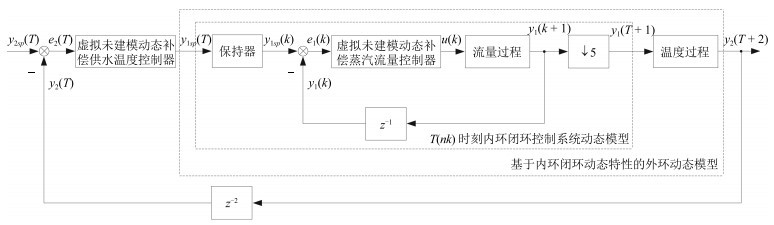
图 2 工业换热过程双率串级控制结构框图
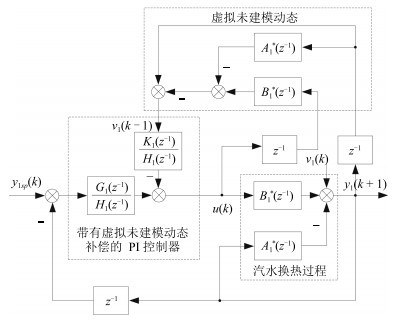
图 3 蒸汽流量虚拟未建模动态补偿控制结构框图
本文针对具有综合复杂性的工业换热过程, 将未建模动态、干扰和参数时变等考虑为虚拟未建模动态.通过产生虚拟未建模动态补偿控制信号, 对PI控制率加以修正, 从而使控制器具有自适应能力.本文提出的自适应信号控制方法无需参数辨识, 通过基于工业换热过程机理模型的半实物仿真实验, 验证了本文控制方法对模型参数时变的被控过程, 可以将供水温度控制在目标范围内.这一结果对于解决具有不确定模型参数的复杂工业过程的控制问题具有重要的工程意义.
作者简介
杨天皓
北京矿冶科技集团有限公司助理工程师.2014年和2017年在东北大学获得学士学位和硕士学位.主要研究方向为选冶过程的建模, 控制与优化.E-mail:yangtianhao@bgrimm.com
贾瑶
流程工业综合自动化国家重点实验室博士研究生.主要研究方向为复杂工业过程控制理论及技术.E-mail:jiayao_neu@163.com
刘腾飞
东北大学教授.主要研究方向为非线性系统稳定性, 鲁棒控制, 自适应控制, 分布式控制.E-mail:tfliu@mail.neu.edu.cn
柴天佑
中国工程院院士, 东北大学教授.IEEE Fellow, IFAC Fellow, 欧亚科学院院士.主要研究方向为自适应控制, 智能解耦控制, 流程工业综合自动化理论, 方法与技术.E-mail:tychai@mail.neu.edu.cn
https://m.sciencenet.cn/blog-3291369-1422871.html
上一篇:惯性串联系统的自抗扰控制
下一篇:基于极限学习机参数迁移的域适应算法