本文作为论文OBPRM:An Obstacle-Based PRM for 3D Workspaces的阅读笔记。 其实,提出OBPRM的这篇论文算是我在运动规划这个方向上较早地读过的一篇文章,但是,由于自己对PRM的理解不够透彻,OBPRM到底是什么,我一直没有搞清楚。TAMU的Nancy M. Amato教授 ...
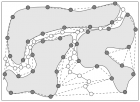
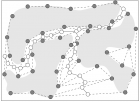
本文作为论文MAPRM: A Probabilistic Roadmap Planner with Sampling on the Medial Axis of the Free Space的阅读笔记。 首先,做好思想准备:这是一篇需要一点拓扑学知识的文章。如果你对拓扑学有较多的了解,那么这篇文章根本没难度;否则,请先跟随我 ...
本文作为论文The Bridge Test for Sampling Narrow Passages with Probabilistic Roadmap Planners的阅读笔记。 窄道(narrow passage)问题在运动规划领域算是臭名昭著了。由于窄道的体积(volume)总是很小,导致一些基于体积的 ...
本文作为论文A Randomized Roadmap Method for Path and Manipulation Planning的阅读笔记。 这篇论文发表于1994年,那时候还没有明确提出PRM的概念,不过当时斯坦福大学的Lydia E. Kavraki和Jean-Claude Latombe已于同年早些时候 ...