博文
平行系统方法在自动化集装箱码头中的应用研究
||
平行系统方法在自动化集装箱码头中的应用研究
郑松, 吴晓林, 王飞跃,
林东东, 郑蓉, 柯伟林,
池新栋, 陈德旺
【摘 要】 平行系统是一种建立在人工社会和计算实验基础上的科学研究方法, 它的特点是既能真实反映现实系统的动态过程, 又能实时优化现实系统的控制过程. 自动化集装箱码头是一类典型的复杂系统, 既存在不计其数的作业方案, 同时也有大量的 约束条件. 如何在最短时间和最低能源消耗的前提下, 完成具有间歇和批次特征的集装箱转运任务, 是涉及到数学、控制、管 理和计算机等多个学科的重大课题. 本文采用数据引擎作为人工社会中的基本计算单元, 构成一个复杂的平行系统, 用于自动 化集装箱码头信息控制系统的研究. 数据引擎作为一种面向图形化元件组态的计算环境, 非常适用于复杂系统的建模与计算. 在可视化和动态重构技术的支持下, 利用 380 个数据引擎对一个具有 8 台岸桥、25 辆 AGV 和 16 台龙门吊组成的港机系统 进行了自动化作业过程的计算实验. 研究结果表明, 数据引擎技术是实现平行系统的有效方法, 由多数据引擎组成的计算环 境, 能够大幅度降低自动化集装箱码头信息控制系统建模的复杂程度, 能够将码头系统的管理和控制过程无缝地融合在一起. 该平行系统可直接与港机设备对接, 建立 “人工码头” 和 “物理码头” 之间的平行关系, 从而实现对港机设备的最优控制.
【关键词】 平行系统, 自动化码头, 数据引擎, 复杂系统, 多代理
引用格式 郑松, 吴晓林, 王飞跃, 林东东, 郑蓉, 柯伟林, 池新栋, 陈德旺. 平行系统方法在自动化集装箱码头中的应用研究. 自动化学报, 2019, 45(3): 490−504 DOI 10.16383/j.aas.c170734
Applying the Parallel Systems Approach to Automatic Container Terminal
ZHENG Song, WU Xiao-Lin, WANG Fei-Yue,
LIN Dong-Dong, ZHENG Rong, KE Wei-Lin,
CHI Xin-Dong, CHEN De-Wang
Abstract Parallel systems are a kind of scientific research method based on artificial society and computational experiments, which can not only reflect the dynamic process of real system but also optimize the control process of the real system in real time. The automatic container terminal is a typical complex system having numerous operating schemes and a large number of constraints. How to accomplish the container transport task with intermittent and batch features while using minimum time and energy consumption is a major issue, which involves many disciplines such as mathematics, control, management and computer. In this paper, the data engine is used as the basic computing unit of the artificial society of parallel systems, to study the information control system of the container terminal. As a computing environment for graphical configuration, the data engine is ideal for modeling and computation of complex systems. With the support of the visualization and dynamic reconfiguration technologies, 380 data engines are used to perform computational experiments on the automation process of a port system, which consists of 8 bridge cranes, 25 AGVs and 16 gantry cranes. The results indicate the effectiveness of the data engine technology for parallel systems, and the computing environment composed of multiple data engines can greatly reduce the modeling complexity of the port information control system as well as make the information management work with the control process cooperatively. The proposed parallel systems can connect to port devices directly to establish a parallel relationship between “artificial container terminal” and “physical container terminal” so as to achieve the optimal control of the port devices.
Key words Parallel system, automatic container terminal, data engine, complex system, multi-agents
Citation Zheng Song, Wu Xiao-Lin, Wang Fei-Yue, Lin Dong-Dong, Zheng Rong, Ke Wei-Lin, Chi Xin-Dong, Chen De-Wang. Applying the parallel systems approach to automatic container terminal. Acta Automatica Sinica, 2019, 45(3): 490−504
随着经济全球化的发展, 目前国际贸易中大部分货物是采用集装箱的方式进行运输的.港口承担着集装箱的水陆装卸及暂存功能, 如何提高集装箱运输过程中港口的作业效率, 降低产品的总成本, 已成为全球物流业共同关注的课题[1].从多个国家在港口自动化方面的长期探索及实践来看, 引入自动化集装箱码头信息控制系统(Container terminal information control systems, CTICS)是提高港口作业效率的主要途径[2-5].自1993年世界上第一个自动化集装箱码头控制系统在荷兰鹿特丹港投入运行以来, 自动化码头技术在港机设备改进和码头管理软件的优化上经历了四代的发展和演化, 但是到目前为止全球也只有为数不多的几个自动化集装箱码头在运行.其根本原因就在于CTICS是一类典型的复杂系统, 内含不计其数的作业方案和大量的约束条件, 其工程实现难度很大.如何在满足最短时间和最低能源消耗等优化指标的前提下, 完成具有间歇和批次特征的集装箱转运任务, 是涉及到数学、控制、管理和计算机等多个学科的复杂问题.目前所使用集装箱码头自动化系统计算环境结构都非常复杂, 子系统之间耦合性强, 它的设计、开发和运维的成本非常高, 这在很大程度上抵消了自动化系统效率提升所带来的效益.因此, 如何判定一种计算结构和相应的控制算法是否科学和有效就成为了CTICS研究和应用中亟待解决的一个科学问题.平行系统理论为此提供了有效的方法.
平行系统是指由某一个自然的物理系统和对应的一个或多个虚拟或理想的人工系统所组成的共同系统[6].在这一共同系统中, 人工系统被认为是实际复杂系统另一种可能的实现方式, 能够以更加主动的、动态适应的方式介入物理系统的管理和控制, 从而降低复杂系统的研究难度[7-8].如何在降低CTICS复杂性的同时又能提高其控制品质是自动化集装箱码头工程技术研究与发展的主要目标.前者主要依靠分布式计算[9]来实现, 后者则可依靠虚实交互的技术来解决[10].虽然平行系统理论在这方面能够发挥重要作用, 但是我们如何能够有效完成平行系统中的计算任务, 目前的研究相对不足.
为此, 本文提出一种平行集装箱码头信息控制系统(Parallel container terminal information control systems, PCTICS)体系架构, 并研究该系统的计算环境, 以满足平行系统虚实互动的计算要求.我们认为, 在平行世界里, 人工系统和物理系统的计算环境应该具有算法及执行的一致性, 才能保证计算实验的有效性, 才能满足虚实交互的技术要求.在这里我们采用数据引擎的理论与方法来建立这样一种计算环境, 并通过多代理软件工程的方法建立了码头信息控制人工系统的分布式结构.利用数据引擎的可视化与可动态重构的特性, 对该人工系统进行了计算实验, 同时也探讨了平行控制工程实现的基本原理, 从而为码头信息控制系统的发展开辟了一条新的途径.本文其余部分结构如下.第1节介绍了集装箱码头信息控制系统相关技术的研究现状.第2节阐述了平行控制与数据引擎的基本原理.第3节给出平行码头的定义及平行码头信息控制系统的体系架构.第4节介绍平行码头算法组态与系统部署.第5节展示了平行码头的实验案例与结果分析.最后在第6节进行了总结和展望.
1 码头信息控制系统
CTICS在全球集装箱码头中应用已成为该领域技术发展的大趋势, 也是近年来研究的热点课题[11-14].该系统要求能够批次地、准确、高效地处理大量集装箱的作业任务, 涉及集装箱进出码头过程中港机设备的调度、装卸转运, 以及船图和库存等信息的存储和管理.由于在处理集装箱码头信息控制过程时存在港湾自然环境差异、船舱及堆场集装箱分布变化、自动引导车(Automated guided vehicle, AGV)运载路线调整, 及操作人员临时介入等诸多不确定因素, 而且这些因素之间还存在不同程度的相互影响, 所以在一般情况下, 我们是很难判定一种CTICS是否能够满足码头生产所有工况的需求.
近年来, 学术界对于CTICS的研究大多集中在码头系统的架构、仿真、产能和效率的评估上[15-26]. Xin等分析了码头系统离线调度存在的问题, 采用交互机来降低集装箱处理系统的延迟, 以节省系统调度时间[27]. Homayouni等从理论上分析了采用遗传算法提高码头设备调度的可行性和性能[28]. Yang等构建了一个基于参数化设计思想的新型仿真系统, 对采用轨道交通的自动化码头效率进行了分析评估[29]. Kim等设计了一种基于Java的面向对象的仿真系统, 用于自动化码头的控制策略研究[30]. Xin等提供了一种以节能的方式提高自动化集装箱码头处理能力的方法, 可有效降低码头成本, 提高产量[31].
鉴于多代理系统具有分布式并行处理和可维护性高等特点, 许多研究者也十分关注如何应用多代理系统方法构建高效的自动化集装箱码头信息控制系统, 并在码头模型、规划、调度和决策等方面取得了显著的成果[32-36]. Thurston等曾设计一种基于分布式多智能体系统(Multi-agent system, MAS)的集装箱码头调度系统, 并分析了多代理系统在提高码头运作能力方面的可行性[32]. Li等应用哈弗架构和代理计算的方法建立了集装箱码头物流系统的运算处理模型[33]. Rebollo等提出了一个基于多智能体的系统架构, 用于解决港口集装箱码头的管理问题[34].王祥雪等针对振华重工码头的运作特点, 采用MAS方法将码头中的装卸设备抽象为具有一系列属性和方法的智能体, 构建出自动化码头协同作业系统模型, 为自动化码头调度优化提供一定的理论指导[35].
由于CTICS的复杂性, 早期基于多代理的码头系统研究多聚焦在堆场理箱、AGV调度、泊位控制等码头作业的局部系统中.然而自动化码头的高效运作离不开各子系统的协同工作, 每个处理单元若不能在架构上得到统一地设计, 将导致系统内部数据交互的成本大幅度上升.因此, 近年来针对整个CTICS业务流程的管理及其控制问题也逐渐受到了学术界的关注. Choi等介绍了一种集装箱码头的企业资源规划(Enterprise resource planning, ERP)系统方法, 目的在于处理集装箱码头运营中整体信息资源整合不足, 用户数据断开和数据不准确等问题[37]. Hoshino等提出了一种以自动引导车、自动转运起重机(Automatic transfer crane, ATC)和码头集装箱起重机(Quay crane, QC)为主要设备的双层集装箱装卸作业模型, 以提高码头的运营效率, 并验证了模型的有效性[38].李斌等将经典的PID (Proportion integration differentiation)控制引入到港口的生产调度中, 形成了一种新的调度算法, 以此获得集装箱码头物流系统(Container terminal logistics systems, CTLS)最优的生产策略[39].
另一方面, 根据Dragović等[40]在2016年针对54年来对港口主要文献的统计发现, 全球港口码头的仿真软件大约有55种之多.这些软件在编程语言、算法与模型及其运行环境等方面与码头实际应用系统存在很大的差异.换言之, 目前仿真系统与码头实际运行系统基本上处于完全不同的计算环境, 这就严重影响了仿真系统动态特性的研究及其研究成果在工程上的应用效果.造成这一现象的主要原因一方面是由于大部分研究仍局限于对实际物理设备机理的简单模拟, 没有考虑运行模式、计算环境和信息融合差异的影响; 另一方面则是缺乏一种理想的仿真软件平台, 能够为研究者提供与实际系统一致的计算环境.然而, 王飞跃等[7]提出的基于ACP (Artificial societies, computational experiments, parallel execution)的平行系统理论和郑松等[41]研究的数据引擎技术, 将有助于实现复杂系统虚拟环境与现实环境的一致性, 降低复杂系统设计、部署和运维的难度, 或可成为CTICS研究和应用的新方法.
2 平行控制与数据引擎
平行控制是一种基于ACP理论的, 以数据驱动、虚拟交互为特征的控制方法[8].人工社会(Artificial societies)、计算实验(Computational experiments)和平行执行(Parallel execution)是ACP方法的3个基本构成, 也是相对独立的组成部分.如图 1所示, 平行控制的核心思想是借助人工系统将复杂系统问题扩展为多个虚拟问题, 使得实际问题简单化, 然后通过物理系统与人工系统的平行互动, 采用管理与控制、实验与评估以及学习和训练等方式使物理系统逐步地趋向人工系统, 最终实现复杂系统的控制和管理的目标[42-43].平行控制实质上是一种以计算为主要手段的管理与控制复杂系统的方法, 该方法的提出为研究不可分、不可知的复杂系统提供了有效的思路和方法[44].具体而言, 包括3大步骤: 1)利用人工社会或人工系统对复杂系统进行建模; 2)利用计算实验对复杂系统的行为进行分析, 评估其可能的后果; 3)通过物理系统与人工系统之间的虚实互动, 以平行执行的方式对复杂系统的运行进行有效的管理和控制[8].必须指出, 出于对经济、安全以及复杂性的本质等方面的考虑, 大多数情况下复杂系统的研究常常受到各种主观或客观因素的影响, 无法在物理环境中进行实验, 或很难重复实验结果.平行控制为此创造了极为有利的条件, 即借助计算实验的手段来满足物理世界中我们称之为“不可实验”和“难以复现”的复杂系统研究需求.平行系统的作用与传统的仿真技术看似相近, 但是它的主要作用是“验证可能”而不单纯是“模拟真实”.

尽管平行控制方法在理论上是可行的, 但是它的工程实现却非常困难, 主要原因有两个方面.一是平行系统理论应用的主要场合是要在未知的且复杂的物理系统中研究、开发、部署和管理相应的信息控制系统, 若采用传统的软件工程方法进行开发, 软件开发的工作量很大, 且要反复迭代, 开发成本很高.二是在现实的物理系统中, 要实现平行控制的目标, 就必须要有一种合适的计算机制, 使得物理系统与人工系统的计算环境能够保持一致性.这种关系不应仅表现在算法模型层面的一致性, 计算环境执行层面的一致性也极为重要.该计算机制可以令人工系统与物理系统无缝对接, 使得人工系统在多次计算实验后的结果就可以有效地作用到物理系统, 从而实现平行执行.在这样的计算环境中, 平行控制算法在“学习与培训”、“实验与评估”和“管理与控制”三个阶段均能得到连续的优化.
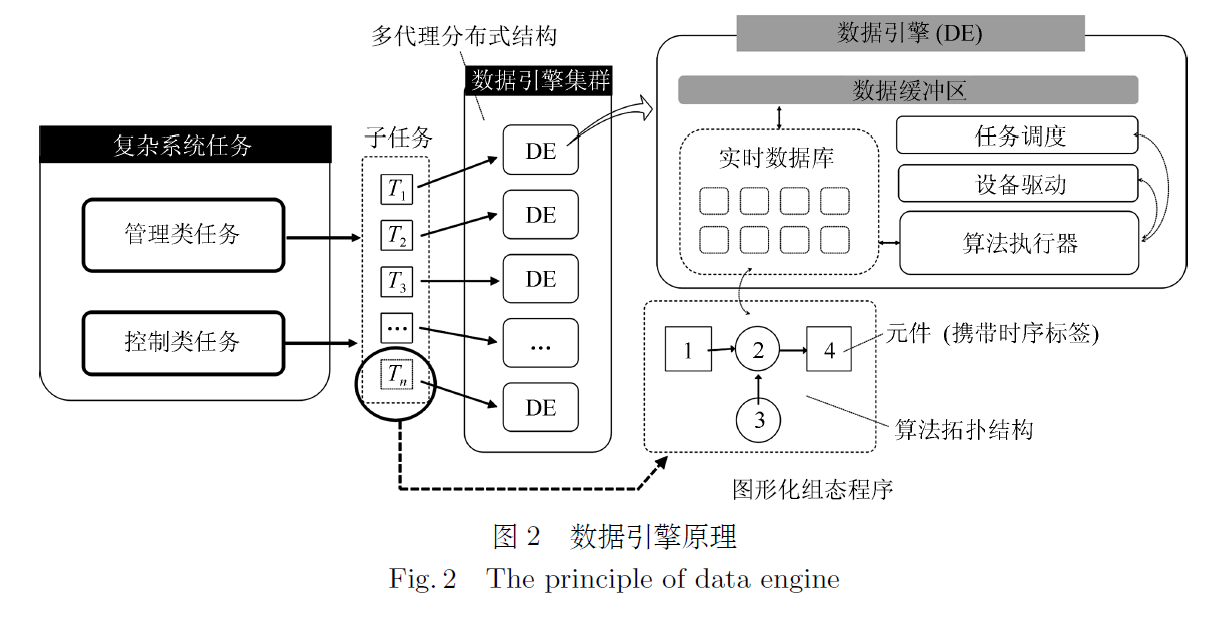
为了实现上述计算机制, 我们引入一种称之为“数据引擎”的技术.这是一种能适用于平行系统构建需求的计算环境, 其本质是一类基于MAS技术规范的数据处理机制, 它能够按照统一标准的规范进行数据结构的解释和驱动, 并对控制组态数据的关系进行重构[41, 45].作为一种数据驱动的中间件软件, 如图 2所示, 数据引擎的核心是一种基于内存的实时数据库, 它与控制对象以及控制器无关, 所以能够部署在PLC (Programmable logic controller)、IPC (Industrial personal computer)和PC (Personal computer)等不同类型的控制器上.数据引擎实时数据库内存放的是一组组态数据, 它们是从特定的图形化组态元件及其连接关系中编译而来的.这种组态元件是可复用的, 它的内部均封装了特定的算法, 元件之间的拓扑关系决定了相应元件的计算时序.在计算过程中, 数据引擎中的算法执行器根据元件的计算时序依序对元件的组态数据进行处理, 使得控制算法的执行过程等同于数据引擎实时数据库的数据更新过程.
数据引擎技术在解决码头信息控制系统的设计和应用问题方面优势明显, 主要原因可归纳为以下4个方面: 1)它是针对复杂系统而设计的.数据引擎本身是一类具有通信、存储和计算能力的服务单元.单个数据引擎可作为独立的服务代理, 用来处理一组相对简单的控制任务, 而复杂的应用则可被分解为多个子问题交由不同服务代理来处理, 从而形成了分布式的多代理控制结构, 即多引擎计算环境.所有数据引擎的结构都是相同的, 不同数据引擎之间可通过数据总线相互连接实现交互.这种多代理结构确保了多引擎之间的强交互性[46], 因此非常适用于完成复杂系统的计算任务. 2)提供了可视化计算的环境[46].任何一个复杂系统, 无论是虚拟的人工系统, 还是现实的物理系统, 如果计算过程始终呈现"黑盒子"状态, 那么平行系统理论的作用就很难得到最大程度的发挥.可视化计算也是判断计算实验效果的有效手段.在数据引擎中, 可视化功能是通过访问实时数据库而实现的, 其可视能力达到元件级, 即每一个元件输入输出和内部参数的变化均为可观测. 3)提供了动态重构的机制[45].算法的在线优化是平行系统理论应用的一项目标.平行系统投入运行之后, 人工系统将伴随着物理系统长期运行.由于系统任务存在很大的不确定性, 因此除了性能状态的动态修正之外, 算法结构上的优化也必不可少.数据引擎技术提供的动态重构机制可对此发挥关键的作用.动态重构是一种在系统运行时进行控制算法无扰动在线更新的方法, 它通过对实时数据库的读写而实现.动态重构能够根据系统运行过程中性能指标的变化和管理需求的调整进行“随动控制”.重构过程不仅能优化复杂系统的各项参数, 还可对算法结构进行调整, 以达到"结构摄动"的目的.这是指系统在可接受的、较长时间跨度内, 通过算法的微小修正稳步地达到“算法进化”效果, 同时尽可能减小对系统的扰动, 使得在线优化过程更加稳定和可靠.这个过程可通过逐步增加、替换或删除元件的方式来实现. 4)具有与硬件无关的特性[41].数据引擎内部采用了特定的数据建模方法和标准的数据结构规范.从算法执行的机理来看, 数据引擎的计算过程等同于实时数据库的数据更新过程.这一特性为复杂系统虚实交互创造了条件.由于数据引擎与控制器无关, 人工系统所采用的虚拟控制器和物理系统中的实际控制器在软件上是完全一致的, 不同的仅仅是CPU (Central processing unit)等物理器件的性能差异.因此, 基于数据引擎构建的人工系统, 其业务流程和控制算法在执行时和物理系统是完全一致的.通过这样的设计, 平行系统中人工、物理两大系统的"趋近等同"就能更加客观地体现在算法模型的优化和修正上.数据引擎上述特性大大地降低了平行系统算法设计、开发的复杂度和成本.
3 平行码头的体系架构
图 3是采用数据引擎作为计算环境的平行码头基本框架.平行码头包括3大要素:物理设备、人类, 以及管理或控制关联的知识和信息.码头内含一定数量的AGV小车、岸桥、龙门吊、控制器、网络器件、传感器和执行器等装备, 它们构成了一类物理系统.而虚拟的管理与控制软件、装备模型、控制算法和数据中心共同组成了人工系统.社会系统由操作人员组成, 人类通过人机交互界面产生需求信号, 同时传入物理系统和人工系统.在平行码头中, 人类介入码头信息控制系统主要方式有3种, 一是因环境变化或设备故障导致安全性或效率降低时所采取的人工干预; 二是系统设备的正常维护与管理操作; 三是对系统资源调度与控制算法的优化.
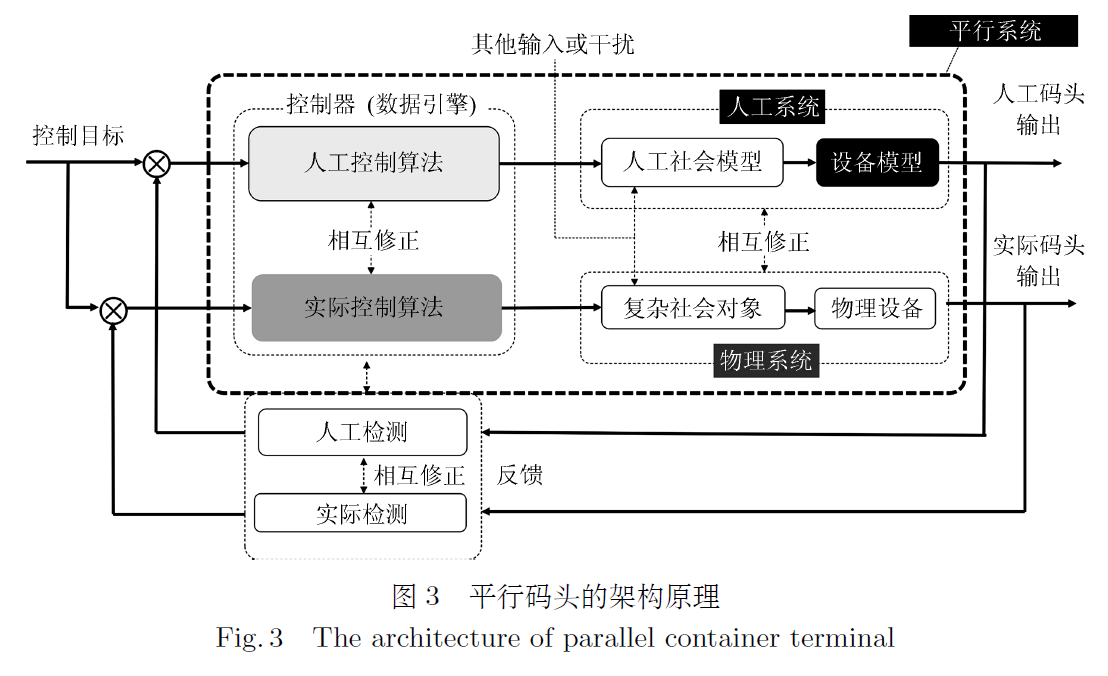
如图 3所示, 在平行系统中, 通过监控和对比“人工”和“物理”两个系统的行为和状态, 可以实现每个系统未来状态的预测和评估, 据此来调节各自系统管理和控制的方式[43, 47-48].平行码头的目标就是比较“物理码头”和“人工码头”的输出误差, 通过不断的计算实验来引导和调整物理系统, 使其输出满足特定的要求.平行系统内部通过各自的检测环节形成反馈, 从而构成了双闭环的控制系统.平行码头的最大特点就是提高人工码头的主导地位, 它不是一种被动仿真、静态模拟和离线优化的计算系统, 而是一种主动的而且能够持续在线优化的计算系统.
平行码头的计算实验通常由两个部分组成. 1)人工码头的独立实验, 主要验证控制算法的功能和性能, 并获得自动化码头的最佳作业指标. 2)在物理码头与人工码头并行工作状态下的实验, 主要验证人工码头的设备模型, 以及物理码头的控制功能和性能逼近人工码头的状态.当出现设备模型与物理设备状态偏差大, 或平行系统中控制功能和性能之间的偏差大情况时, 利用平行控制中的修正机制进行调整.在图 3中, 平行的两类控制器和设备模型均采用数据引擎计算环境, 因此我们可以利用可视化计算特性完成平行码头中相关偏差的检测, 同时可以利用动态重构功能对相应的控制算法或设备模型进行在线修正.这种检测和修正工作均由数据引擎的组态软件工具来完成.在平行的两类控制器中, 由于数据引擎计算环境的一致性, 导致它们的控制算法组态也同样能保持严格一致, 所以人工控制器可以采用低值的计算设备而不会影响到计算实验和平行执行的效果, 这也可以说是数据引擎能够应用于平行系统最重要的原因.
图 4(a)、4(b)和4(c)给出了人工码头控制算法组态的构建方法.码头PCTICS的功能构成十分复杂.如图 4(a)所示, 它既要处理龙门吊进出箱作业、AGV水平运输, 及岸桥水陆装卸及其与AGV运载集装箱的交接等设备调度和控制处理的任务, 又要满足船舶靠泊、装卸船、堆场作业、闸口进出箱等计划管理事务的需求.在物理系统中, 这两块任务分别由码头任务管理系统(Task management system, TMS)和设备管理控制系统(Equipment management control system, EMCS)来完成.平行码头中人工系统相应模型包括设备控制与管理相关的基本模型, 以及作业信息统计和能效分析等评估模型.

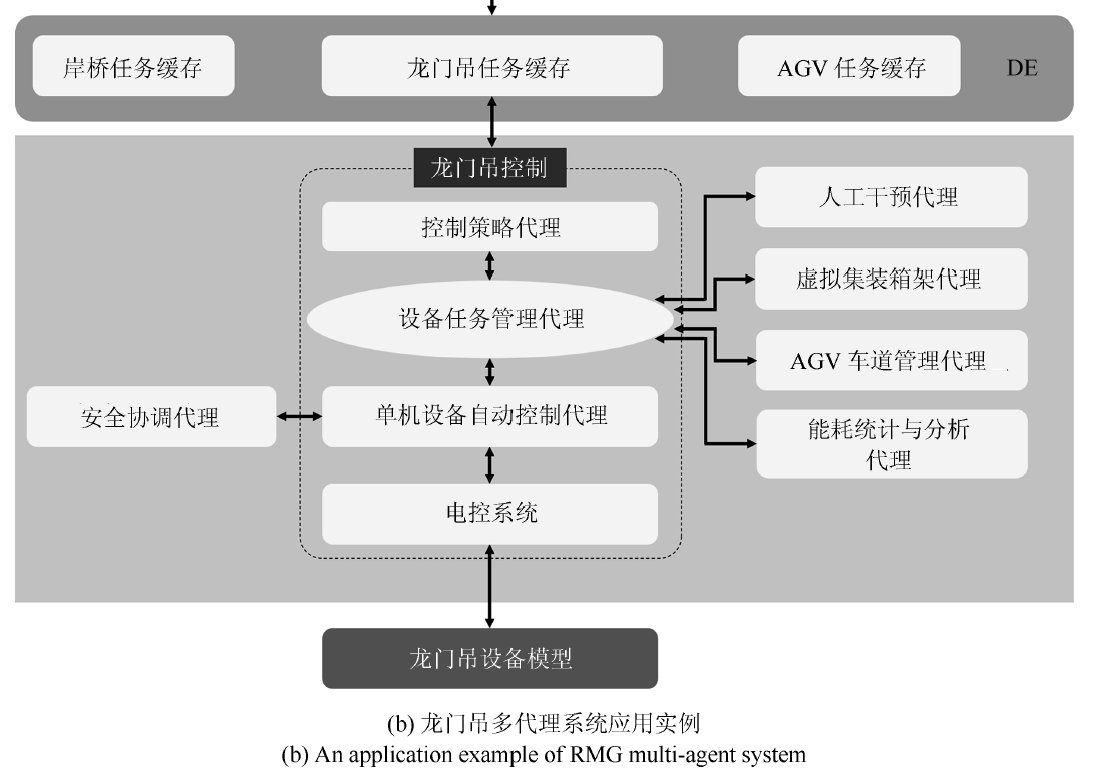

以EMCS中的堆场双龙门吊为例, 系统功能分为任务管理、作业模型、控制策略、数据通信和人机交互等几个部分(见图 4(b)).每个部分的功能都可以通过不同的服务代理组合及其交互来实现.例如, 龙门吊的任务管理需要考虑人工干预, 以及集装箱架、集卡、AGV等周围环境因素的变化, 其任务管理代理就需要与人工交互代理、集装箱架代理和车道管理代理进行信息关联.
面对如此复杂的功能结构, 如何让编程问题简单化是本文要解决的关键问题. “模块化”是设计和开发PCTICS管理和控制程序的重要特点.采用模块化的组态技术, 提升了人工码头与物理码头之间软件技术资源的复用性, 同时也降低了平行系统设计的复杂性, 有利于多代理软件工程学方法在自动化集装箱码头中的应用. 图 4(b)是码头龙门吊多代理软件系统的应用实例. 图 4(c)是该系统中数据引擎内嵌的一个组态模块的实例.这是一个算法抽象的组态元件.根据其算法定义, 可以在诸如AGV的电池余量判断和堆场堆垛空间余量判断这两个完全不相干的代理服务中同时引用这个组态元件.这就是软件元件复用性的作用, 即用成熟的计算资源来完成不同的计算任务.在这过程中不需要进行任何软件代码的开发, 只需要通过拖拽相应的模块即可完成特定的代理服务的算法组态.
根据我们的研究, 构建一个中型港口码头信息控制系统所需要的组态元件数量大约需要50万个左右.每个元件以及由不同元件组合构成的具有特定功能的逻辑段均可存入数据库中实现批量管理和资源复用.
4 平行系统的算法与组态
在平行码头中, “人工码头”信息控制系统的作业流程与“物理码头”完全一致.信息控制过程的算法及模型均被提交到数百个数据引擎构成的平行计算环境中运行, 如图 4(a)所示, 管理、控制和设备三类代理协同工作可以满足码头的作业需求, 这个过程涉及闸口、集卡、堆场、龙门吊、AGV、岸桥和船舶等多个作业对象.
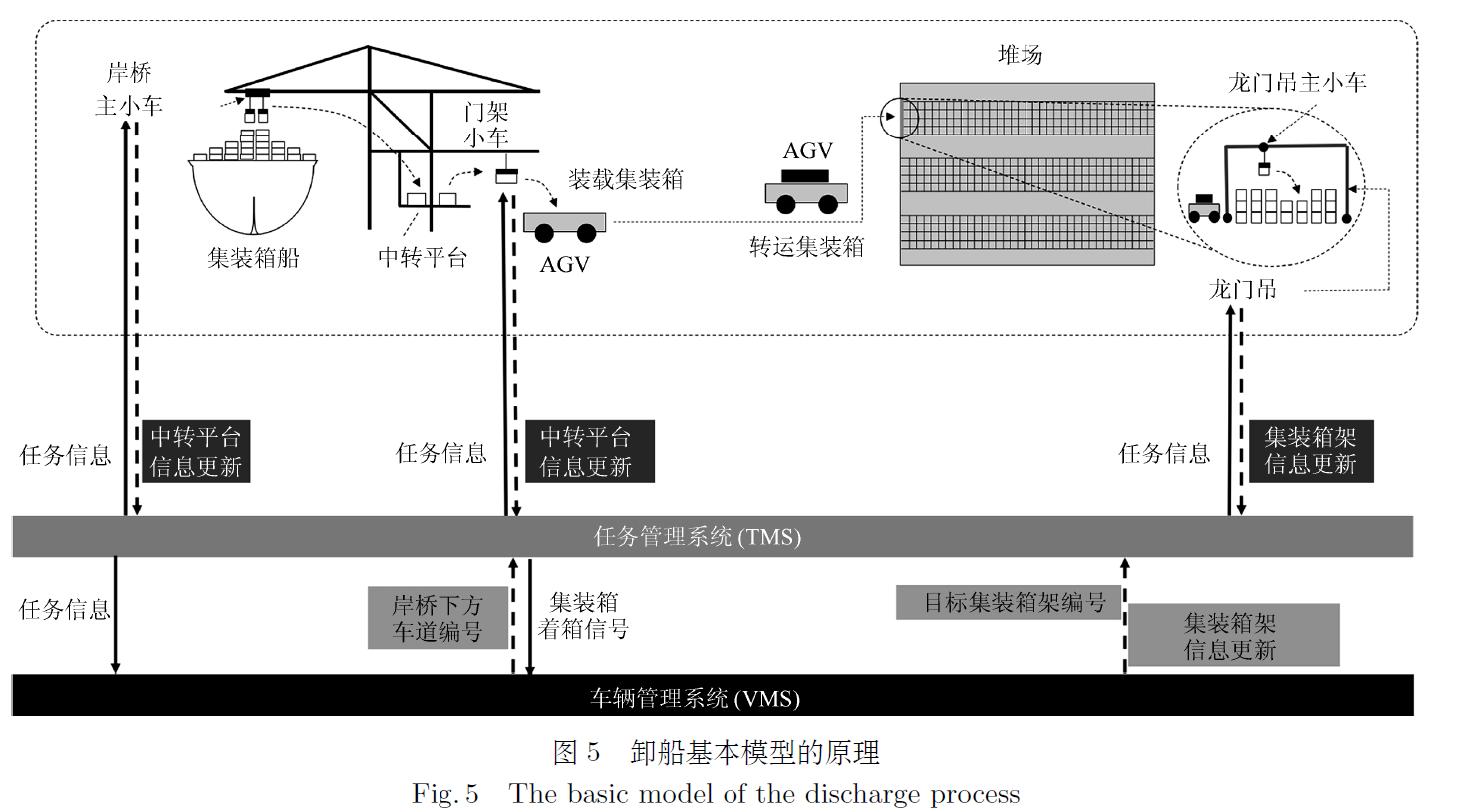
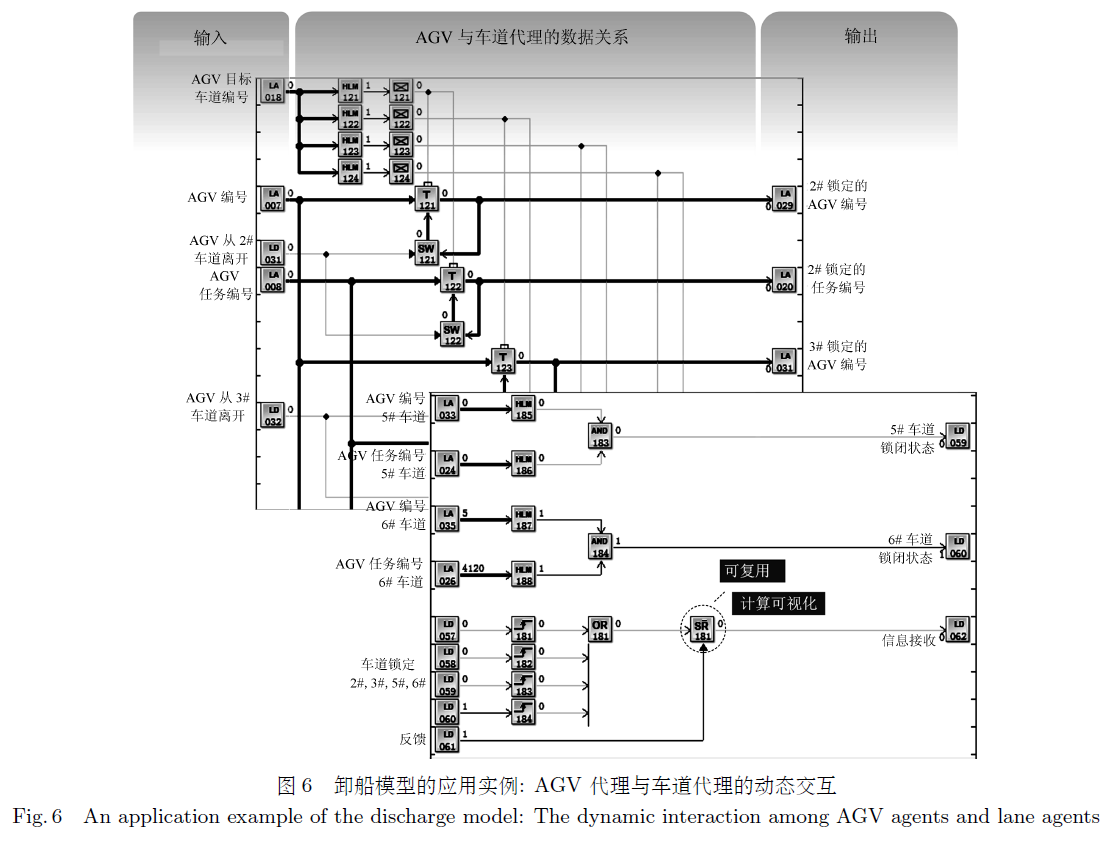
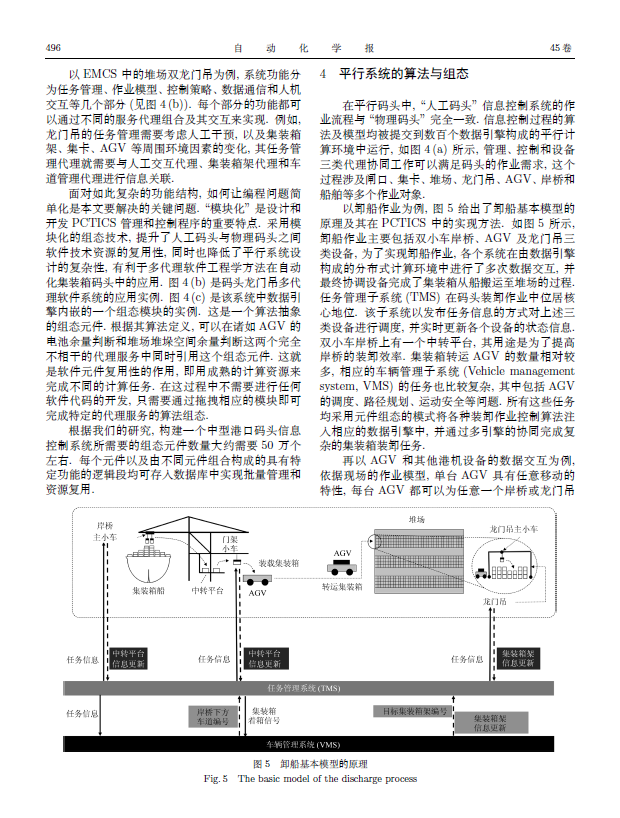
以卸船作业为例, 图 5给出了卸船基本模型的原理及其在PCTICS中的实现方法.如图 5所示, 卸船作业主要包括双小车岸桥、AGV及龙门吊三类设备, 为了实现卸船作业, 各个系统在由数据引擎构成的分布式计算环境中进行了多次数据交互, 并最终协调设备完成了集装箱从船搬运至堆场的过程.任务管理子系统(TMS)在码头装卸作业中位居核心地位.该子系统以发布任务信息的方式对上述三类设备进行调度, 并实时更新各个设备的状态信息.双小车岸桥上有一个中转平台, 其用途是为了提高岸桥的装卸效率.集装箱转运AGV的数量相对较多, 相应的车辆管理子系统(Vehicle management system, VMS)的任务也比较复杂, 其中包括AGV的调度、路径规划、运动安全等问题.所有这些任务均采用元件组态的模式将各种装卸作业控制算法注入相应的数据引擎中, 并通过多引擎的协同完成复杂的集装箱装卸任务.
再以AGV和其他港机设备的数据交互为例, 依据现场的作业模型, 单台AGV具有任意移动的特性, 每台AGV都可以为任意一个岸桥或龙门吊服务.但在某个时间段, 只为一个由车辆管理系统(VMS)指定的对象服务.为了让整个系统各软件代理处于解耦状态, 有必要为岸桥和龙门吊专门设计两类代理(即虚拟车道代理和虚拟集装箱架代理).在AGV的作业过程中, 采用动态匹配的“点对点”方式与另外两类代理进行数据交互.在批次作业过程中, AGV与虚拟车道代理及虚拟集装箱架代理的交互关系可以阶段性地切换, 以提高通信过程的可靠性和灵活性.
如图 6所示, AGV与虚拟车道代理的交互功能是通过T (锁存器)、AND (与门)、OR (或门)等多个可复用的元件按照特定连接关系来设计和实现的, 由此形成的组态关系被下载到数据引擎进行计算, 元件的实时值可以被动态地反馈到组态程序界面中.
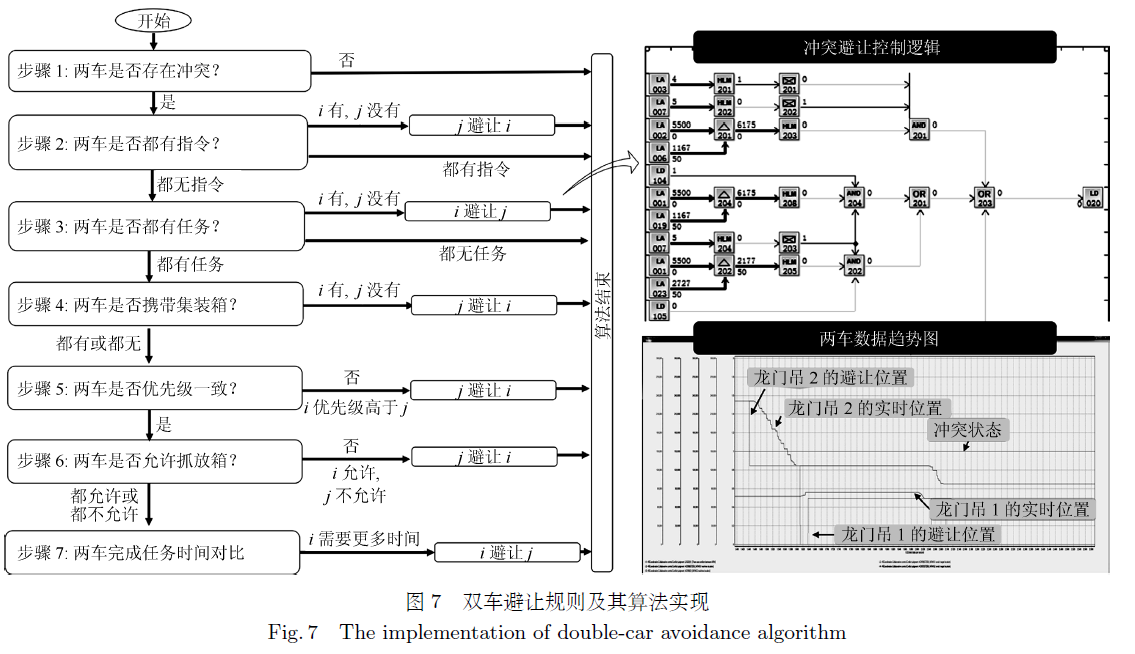
尽管码头作业过程中存在大量的、面向不同任务需求的信息处理和设备控制过程, 但是其中算法与模型的实现环境及方法是完全一致的, 都是借助元件组态的方式来编程. “人工码头”中的管理或控制算法的组态程序可以通过不断地计算试验, 达到预期效果后可直接转载到物理码头的CTICS中运行.以堆场内出现的双龙门吊作业区域冲突情景为例, 本文设计了双车避让规则, 当系统满足设定条件时, 将自动触发协调控制机制, 以保障大车运行的安全性.该过程利用497个元件来构建龙门吊安全协调代理, 提供了35个实时数据采集信号的输入和8个安全控制算法的输出(参见图 7).所输入的信号数据主要包括车辆设备状态、任务信息、实时位置和目标位置; 输出数据则包含最终避让位置, 避让状态、允许设备运动等数据.通过这样一个单独的协调代理, 系统不仅可以有效地处理和保障两台龙门吊的运行安全, 同时也可借助数据引擎的虚拟计算环境, 在平行空间内进行大量计算实验, 结合能耗统计与分析代理, 以运行效率和能耗为优化指标, 确定最优的设计方案来指导"物理码头"的双龙门吊安全运行.
5 实验案例研究
5.1 人工码头计算实验系统的设计
本研究设计并开发了一个与“物理码头”业务过程一致的“人工码头”, 以验证平行码头架构原理及方法的有效性.采用计算实验的方法, 研究自动化集装箱码头的全流程作业以及管理与控制策略的动态优化, 以此获得人工码头的功能与技术性能, 进而不断进行迭代优化, 最终用于修正“物理码头”的管理和控制.如图 8(a)所示, 所构建的人工码头由8台双小车岸桥、25台AGV及16台龙门吊组成.这3种设备分别用于执行集装箱的装卸、水平运输和堆场搬迁作业.
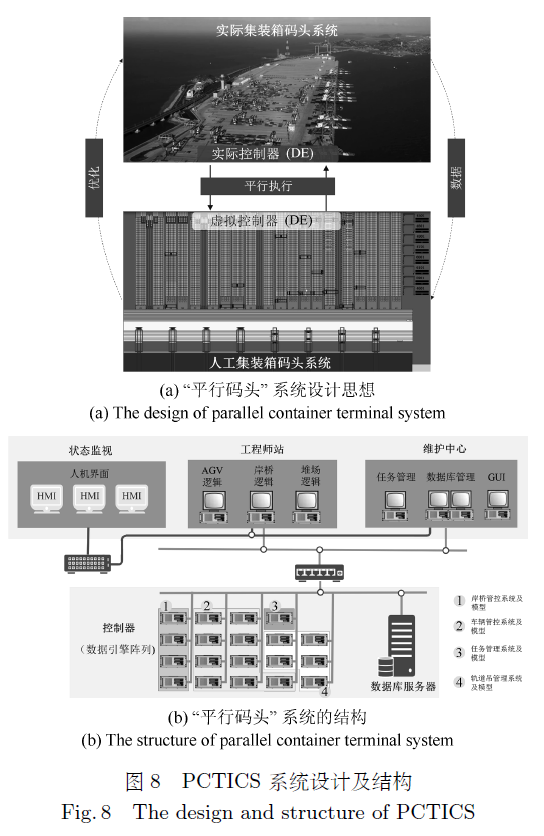
“人工码头”装卸区共有7个车道, 每个车道宽4 m, 间距4 m.每个无悬臂堆场配置5个集装箱架, 间距5 m, 垂直间距为119 m.该实验系统采用与物理码头一致的设备参数、结构和工艺流程[49-51]. 图 8(b)给出了人工码头的网络结构示意图.该系统由26套PC、1台服务器、3个液晶大屏和配套网络设备组成, 其中19台为内嵌Linux的工业PC, 且每台IPC分别配置了20个数据引擎节点, 形成总计380个数据引擎组成的计算环境, 分别承担任务管理(20套数据引擎)、岸桥系统(80套数据引擎)、车辆系统(180套数据引擎)和堆场龙门吊系统(100套数据引擎)等作业任务.其余PC安装了人机交互软件, 为操作人员参与管控提供交互窗口.工业PC内的多引擎计算环境采用多线程的软件结构.每个数据引擎的实时数据库是独立的.在图 8(b)的多引擎环境中, 引入一种面向数据引擎的数据总线, 实现多引擎之间的数据共享.为确保人工码头计算实验的实时性, 数据引擎的计算周期设定为100毫秒, 数据共享通讯周期不大于500毫秒.
根据上述设计, 本文研究安排了两组实验, 以验证“平行码头”的理论框架, 并对“人工码头”整体功能和性能的做出相应的评估.
5.2 案例研究与结果
实验1.集装箱卸船全流程作业
该实验以上述堆场、AGV和岸桥为研究对象, 全面展示“人工码头”中某AGV完成卸船全流程作业的动态情景, 其目的是验证数据引擎技术在复杂的集装箱码头信息控制系统中应用的可行性, 以满足码头基本的作业需求.卸船作业流程详见图 5.实验时, 选取码头堆场地平面上某处为设备坐标的基准点.岸桥目标位置距离海岸60.8 m, 堆场目标位置距离集装箱架为34.4 m, AGV路线总长为258.07 m.
图 9展示了“人工码头”卸船全流程作业的动态过程, 包括每种设备的功能、实时运行状态, 以及多个设备之间协同完成复杂任务的动态.整个卸船的功能是通过任务管理系统、岸桥子系统、AGV子系统和龙门吊子系统中大量代理功能的执行及其交互协作来实现的.如图 9 (b)和9 (c)所示, 当任务管理系统下达卸船指令后, AGV小车将按照图中所示的轨迹路线以空载状态行驶到目标岸桥指定的区域, 这一过程通过与虚拟车道代理6号道的数据交互来完成.与此同时, 岸桥主小车也启动海侧的抓箱任务. 图 9 (d)给出了岸桥进箱过程每个设备的实时位置轨迹.可以观察到, 岸桥子系统接收到进箱指令后, 主小车及其吊具将依次启动, 完成从船上抓取目标集装箱至中转平台的功能操作.期间门架小车也协同地移动到中转平台, 及时地将集装箱转移至停靠在指定车道上已在等候转运指令的目标AGV上.如图 9 (c)所示, 在装箱结束后, AGV发出对5# # 集装箱架的架位请求, 并在收到5# # 集装箱架代理反馈的锁定信号后, 按照规划的路径行驶到堆场中目标集装箱架处. 图 9 (a)给出了龙门吊抓箱过程大车、主小车和吊具的实时位置, 可以观察到, 当AGV到达后, 这三种设备共同协作完成了对集装箱的抓箱动作, 实现了集装箱从集装箱架到目标区域的转移. 图 10进一步展示了8台岸桥全部投入连续作业时码头的装卸效率情况.可以看出, 人工码头的平均装卸效率可达每个岸桥28.75 mov/h, 而一般的自动化码头设计的装卸效率为每个岸桥30 mov/h左右[2].图中不同岸桥的平均装卸效率略有差异, 这主要是由AGV充电区与各个岸桥距离不同造成的, 根据本实验设计的车辆调度算法, 靠近充电区的QC更易获得车辆资源.


实验结果表明, 本文设计的人工码头信息控制系统能够有效地调度港机设备协同地完成集装箱卸船任务, 且装卸性能达到了理想的水平, 可满足集装箱码头基本的装卸需求, 同时也验证了以数据引擎作为计算环境开发PCTICS的可行性.
实验2.相同工况下AGV控制策略变化的影响
该实验以2个自动化堆场、2台岸桥和8台AGV为研究对象, 通过计算实验, 测试在不同的控制策略下, AGV行驶路径对任务执行效率产生的影响, 其目的是观察“人工码头”在部署多种控制策略和引入不确定因素和事件的情景下, 预测"物理码头"的运行状况, 为“物理码头”管理和控制策略的优化升级提供指导.
传统的路径规划算法主要是通过规划地图中所有节点组合而成的路径距离, 计算最优的路径输出[52-53].实际上, AGV在码头内的行驶方式非常类似高速交通路上汽车的行驶方式, 如图 11所示, 原人工系统采用了传统“无汇流” AGV路径规划策略.为了改善车辆在转弯时车道资源的占用情况, 降低AGV转弯造成的道路拥堵率, 本文设计了一种新的AGV路径规划策略— “汇流”, 即AGV横向行驶过程中, 若当前车道的左侧无其他车辆, 则触发汇流算法, 车辆可平滑换道行驶, 并逐渐并入设定的高速道路.

在实际的物理系统中验证此类特定工况的算法可行性成本高昂且耗时耗力.如图 11所示, 在“平行码头”中, 可以通过人工系统采用动态重构的方式在线地调整和更新AGV路径规划策略(①为初始“无汇流”行驶路径, ②为更新后“汇流”行驶路径), 即可快速地实现并验证“汇流”算法的可行性以及其对集装箱作业时间的影响.图中可以看出, 当数据引擎控制器加载新的控制策略后, AGV的行驶路径随即发生了变化. 表 1给出了两种控制策略下, AGV行驶路径的变化对AGV完成集装箱装卸作业耗时的影响, 可以看出加入汇流策略后, AGV在同样完成20个集装箱任务的前提下, 集装箱的转运效率Δη 约提高了5.17 %.

转运效率提升率Δη 按照式(1)来计算.
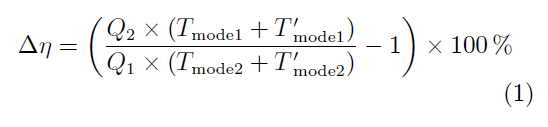
其中Q 1 和Q 2 分别为无汇流和汇流两种行驶策略下任务1与任务2的总作业量.由于该实验中Q 1 = Q 2 , 因此式(1)可进一步变换为式(2).

该实验很好地验证了基于数据引擎的PCTICS在算法优化方面的可重构性.实验结果表明, 所设计的“人工码头”可通过在线的计算实验对码头管理和控制策略进行动态优化及测试, 为CTICS的控制策略设计提供科学依据.平行码头的这一特性在码头作业时间节省和节能降耗方面将有重要的意义.
工程应用案例:平行人机交互系统的快速复用
为了进一步评估PCTICS技术在自动化集装箱码头工程应用上可行性与有效性, 本文以某中型港口码头工程建设系统为原型, 研究了平行码头技术在实际工程中应用问题. 图 12展示平行码头中堆场的人机交互系统.如图所示, 物理系统包含大量的港机设备和自动化区域设备.人工系统也构建了与之对应的虚拟设备、与现场等比例的虚拟场景、业务处理与控制策略.两者的人机交互系统在系统设备、通信和数据库的构成以及整体功能上是完全一致的, 不同的只是运行数据的来源, 一个来自实际码头的设备, 另一个来自码头的模型系统.这套系统在进行计算实验时可以观测人工系统中堆场的动态运转情况, 当物理系统建设完成后, 对其数据来源进行修改, 即可动态呈现实际堆场的运行情况.
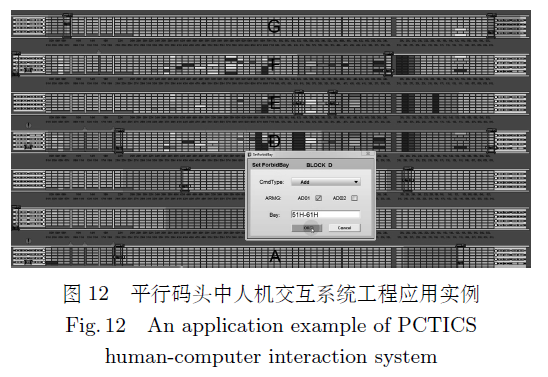
对于平行系统的虚实互动, 无论是物理码头还是人工码头, 都能通过人机交互系统实现对设备(或模型)的操控.通常情况下, 为了确保码头作业的高效性及其安全性, 对平行码头进行系统资源调度、算法优化和设备故障管理等人工干预操作必不可少.这个环节中人起到了关键的作用.以安全控制关键参数的调控为例, 通过如图所示的操控窗口即可实现人与物理系统或人工系统的互动.另外, “人工码头”在该案例工程实施过程中扮演了主导性的角色, 码头操作人员采用“人工码头”测验通过的方案指导物理码头的操控实施, 有效地避免了PCTICS安全事故的发生.
6 结论
如何降低系统的复杂性是自动化集装箱码头信息和管理系统研究的难点.平行系统理论是研究复杂系统管理和控制的有效方法, 但其技术的成熟度仍存在提升的空间.数据引擎是平行系统理论理想的软件实现方法, 能够为复杂系统的管理和控制提供统一标准的计算环境.分布式计算和虚实交互是实现平行码头的关键, 也是降低集装箱码头信息控制系统复杂性的有效方法.本文的主要贡献是提出了一种基于数据引擎的平行码头概念、架构和方法来设计自动化集装箱码头的信息控制系统, 包括码头任务的规划、调度以及设备的建模和控制.研究结果表明, 以数据引擎为计算环境的PCTICS在理论和工程层面上都是可行的.与传统开发方法不同的是, 本文研究的PCTICS中人工码头与物理码头的信息控制系统采用完全相同的图形组态方法与多代理结构, 且人工码头已经通过大量计算实验证实算法构建的可行性及适用性, 而PCTICS具有可视化和可动态重构的在线优化特性, 可通过平行执行逐步达到管控算法进化的目的, 因此这种平行码头的工程实现方法能够大幅度降低集装箱码头自动化系统设计、开发和部署的难度与成本.
虽然基于数据引擎的平行码头的概念和方法目前已得到初步应用, 但这方面的研究仍处于起步阶段, 其有效性和实用性有待更多、更深入的研究和应用加以检验.在不远的将来, 集装箱码头会越来越多地实现少人化甚至无人化, 平行码头的理论和方法也将得到进一步提升, 包括改善“人工码头”与“实际码头”协作效率和自适应程度、人工智能与大数据的应用, 以及设计更加灵活的云虚实交互机制以实现真正的“无人码头”, 这些是我们将要进一步研究的问题.
参考文献
1 Steenken D, Voß S, Stahlbock R. Container terminal operation and operations research-a classification and literature review. OR Spectrum, 2004, 26(1): 3-49. DOI:10.1007/s00291-003-0157-z
2 Liu C I, Jula H, Ioannou P A. Design, simulation, and evaluation of automated container terminals. IEEE Transactions on Intelligent Transportation Systems, 2002, 3(1): 12-26. DOI:10.1109/6979.994792
3 Kim K H, Phan M H T, Woo Y J. New conceptual handling systems in container terminals. Industrial Engineering & Management Systems, 2012, 11(4): 299-309.
4 Dkhil H, Yassine A, Chabchoub H. Optimization of container handling systems in automated maritime terminal. In:Advanced Methods for Computational Collective Intelligence. Studies in Computational Intelligence, vol 457. Berlin, Heidelberg:Springer, 2013. 301-312 https://www.researchgate.net/publication/287785081_Optimization_of_Container_Handling_Systems_in_Automated_Maritime_Terminal
5 Jin J G, Lee D H, Hu H. Tactical berth and yard template design at container transshipment terminals:a column generation based approach. Transportation Research, Part E:Logistics and Transportation Review, 2015, 73: 168-184. DOI:10.1016/j.tre.2014.11.009
6 Wang Fei-Yue. Parallel system methods for management and control of complex systems. Control & Decision, 2004, 19(5): 485-489, 514.
( 王飞跃. 平行系统方法与复杂系统的管理和控制. 控制与决策, 2004, 19(5): 485-489, 514. DOI:10.3321/j.issn:1001-0920.2004.05.002)
7 Wang Fei-Yue, Liu De-Rong, Xiong Gang, Cheng Chang-Jian, Zhao Dong-Bin. Parallel control theory of complex systems and applications. Complex Systems and Complexity Science, 2012, 9(3): 1-12.
( 王飞跃, 刘德荣, 熊刚, 程长建, 赵冬斌. 复杂系统的平行控制理论及应用. 复杂系统与复杂科学, 2012, 9(3): 1-12.)
8 Wang Fei-Yue. Parallel control:a method for data-driven and computational control. Acta Automatica Sinica, 2013, 39(4): 293-302.
( 王飞跃. 平行控制:数据驱动的计算控制方法. 自动化学报, 2013, 39(4): 293-302.)
9 Stula M, Stipanicev D, Maras J. Distributed computation multi-agent system. New Generation Computing, 2013, 31(3): 187-209. DOI:10.1007/s00354-012-303-8
10 Frees S. Context-driven interaction in immersive virtual environments. Virtual Reality, 2010, 14(4): 277-290. DOI:10.1007/s10055-010-0178-2
11 Carlo H J, Vis I F A, Roodbergen K J. Storage yard operations in container terminals:literature overview, trends, and research directions. European Journal of Operational Research, 2014, 235(2): 412-430. DOI:10.1016/j.ejor.2013.10.054
12 Liu Q W. Efficiency Analysis of Container Ports and Terminals[Ph.D. dissertation], University College London, London, 2010
13 Zhen L, Jiang X J, Lee L H, Chew E P. A review on yard management in container terminals. Industrial Engineering & Management Systems, 2013, 12(4): 289-304.
14 Tao J H, Qiu Y Z. A simulation optimization method for vehicles dispatching among multiple container terminals. Expert Systems with Applications, 2015, 42(7): 3742-3750. DOI:10.1016/j.eswa.2014.12.041
15 Vacca I, Salani M, Bierlaire M. Optimization of operations in container terminals:hierarchical vs integrated approaches. In:Proceedings of the 10th SWISS Transport Research Conference. Switzerland, 2010.
16 Cai B H, Huang S D, Liu D K, Yuan S, Dissanayake G, Lau H, et al. Multiobjective optimization for autonomous straddle carrier scheduling at automated container terminals. IEEE Transactions on Automation Science & Engineering, 2013, 10(3): 711-725.
17 Lau H Y K, Zhao Y. Integrated scheduling of handling equipment at automated container terminals. International Journal of Production Economics, 2008, 112(2): 665-682. DOI:10.1016/j.ijpe.2007.05.015
18 Yang Y C. Operating strategies of CO2 reduction for a container terminal based on carbon footprint perspective. Journal of Cleaner Production, 2017, 141: 472-480. DOI:10.1016/j.jclepro.2016.09.132
19 Yun W Y, Choi Y S. A simulation model for container-terminal operation analysis using an object-oriented approach. International Journal of Production Economics, 1999, 59(1-3): 221-230. DOI:10.1016/S0925-5273(98)00213-8
20 Dulebenets M A. Application of evolutionary computation for berth scheduling at marine container terminals:parameter tuning versus parameter control. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(1): 25-37. DOI:10.1109/TITS.2017.2688132
21 Speer U, Fischer K. Scheduling of different automated yard crane systems at container terminals. Transportation Science, 2017, 51(1): 305-324. DOI:10.1287/trsc.2016.0687
22 Al-Dhaheri N, Jebali A, Diabat A. A simulation-based Genetic Algorithm approach for the quay crane scheduling under uncertainty. Simulation Modelling Practice & Theory, 2016, 66: 122-138.
23 Tang G L, Wang W Y, Song X Q, Guo Z J, Yu X H, Qiao F F. Effect of entrance channel dimensions on berth occupancy of container terminals. Ocean Engineering, 2016, 117: 174-187. DOI:10.1016/j.oceaneng.2016.03.047
24 Dkhil H, Yassine A, Chabchoub H. Multi-objective optimization of the integrated problem of location assignment and straddle carrier scheduling in maritime container terminal at import. Journal of the Operational Research Society, to be published https://link.springer.com/article/10.1057%2Fs41274-017-0184-9
25 Gharehgozli A H, Vernooij F G, Zaerpour N. A simulation study of the performance of twin automated stacking cranes at a seaport container terminal. European Journal of Operational Research, 2017, 261(1): 108-128. DOI:10.1016/j.ejor.2017.01.037
26 Liang C J, Fan L B, Xu D H, Ding Y, Gen M. Research on coupling scheduling of quay crane dispatch and configuration in the container terminal. Computers & Industrial Engineering, 2018, 125: 649-657.
27 Xin J B, Negenborn R R, Lodewijks G. Rescheduling of interacting machines in automated container terminals. In:Proceedings of the 19th World Congress the International Federation of Automatic Control. Cape Town, South Africa:IFAC, 2014. 1698-1704
28 Homayouni S M, Tang S H, Motlagh O. A genetic algorithm for optimization of integrated scheduling of cranes, vehicles, and storage platforms at automated container terminals. Journal of Computational & Applied Mathematics, 2014, 270: 545-556.
29 Yang X M, Mi W J, Li X, An G L, Zhao N, Mi C. A simulation study on the design of a novel automated container terminal. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5): 2889-2899. DOI:10.1109/TITS.2015.2425547
30 Kim K H, Won S H, Lim J K, Takahashi T. An architectural design of control software for automated container terminals. Computers & Industrial Engineering, 2004, 46(4): 741-754.
31 Xin J B, Negenborn R R, Lodewijks G. Energy-aware control for automated container terminals using integrated flow shop scheduling and optimal control. Transportation Research, Part C:Emerging Technologies, 2014, 44: 214-230. DOI:10.1016/j.trc.2014.03.014
32 Thurston T, Hu H S. Distributed agent architecture for port automation. In:Proceedings of the 26th Annual International Computer Software and Applications. Oxford, UK:IEEE, 2002. 81-87
33 Li L, Wang X D. Modeling and simulation of container terminal logistics system. In:Proceedings of the 2009 Second International Workshop on Knowledge Discovery and Data Mining. Moscow, Russia:IEEE, 2009. 729-732
34 Rebollo M, Julián V, Carrascosa C, Botti V. A multi-agent system for the automation of a port container terminal. In:Proceedings of Autonomous Agents 2000 Workshop on Agents in Industry. 2000. https://www.researchgate.net/publication/2896616_A_Multi-Agent_System_for_the_Automation_of_a_Port
35 Wang Xiang-Xue, Zhu Jin. Multi-agent system based collaborative operation system about ZPMC automatic container terminal. Application Research of Computers, 2013, 30(4): 1072-1075.
( 王祥雪, 朱瑾. 基于MAS的集装箱自动化码头协同作业系统模型. 计算机应用研究, 2013, 30(4): 1072-1075. DOI:10.3969/j.issn.1001-3695.2013.04.030)
36 Haramabadi H R. Dynamic Scheduling of Automated Guided Vehicles in Container Terminals[Ph.D. dissertation], University of Essex, England, 2006
37 Choi H R, Kim H S, Park B J, Park N K, Lee S W. An ERP approach for container terminal operating systems. Maritime Policy & Management, 2003, 30(3): 197-210.
38 Hoshino S, Fujisawa T, Maruyama S, Hino H, Ota J. Double container-handling operation for an efficient seaport terminal system. Intelligent Autonomous Systems, 2008, 10: 173-182.
39 Li Bin, Yang Jia-Qi. A scheduling algorithm for container terminals within PID control framework. Journal of Transportation Systems Engineering & Information Technology, 2014, 14(1): 124-130.
( 李斌, 杨家其. PID控制框架下的集装箱码头调度算法. 交通运输系统工程与信息, 2014, 14(1): 124-130. DOI:10.3969/j.issn.1009-6744.2014.01.020)
40 Dragović B, Tzannatos E, Park N K. Simulation modelling in ports and container terminals:literature overview and analysis by research field, application area and tool. Flexible Services & Manufacturing Journal, 2017, 29(1): 4-34.
41 Zheng Song, Ni Wei-Dou. Data engine based universal controller. Electric Age, 2008(9): 122-125.
( 郑松, 倪维斗. 基于数据引擎技术的通用控制站. 电气时代, 2008(9): 122-125. DOI:10.3969/j.issn.1000-453X.2008.09.034)
42 Wang Fei-Yue. Software-defined systems and knowledge automation:a parallel paradigm shift from Newton to Merton. Acta Automatica Sinica, 2015, 41(1): 1-8.
( 王飞跃. 软件定义的系统与知识自动化:从牛顿到默顿的平行升华. 自动化学报, 2015, 41(1): 1-8. DOI:10.3969/j.issn.1003-8930.2015.01.001)
43 Wang Kun-Feng, Gou Chao, Wang Fei-Yue. Parallel vision:an ACP-based approach to intelligent vision computing. Acta Automatica Sinica, 2016, 42(10): 1490-1500.
( 王坤峰, 苟超, 王飞跃. 平行视觉:基于ACP的智能视觉计算方法. 自动化学报, 2016, 42(10): 1490-1500.)
44 Wang Fei-Yue. Computational theory and method on complex system. China Basic Science, 2004, 6(5): 3-10.
( 王飞跃. 关于复杂系统研究的计算理论与方法. 中国基础科学, 2004, 6(5): 3-10. DOI:10.3969/j.issn.1009-2412.2004.05.001)
45 Zheng Song, Ni Wei-Dou. Research and implementation of dynamic reconfiguration technology in distributed control system. Atomic Energy Science & Technology, 2009, 43(8): 724-729.
( 郑松, 倪维斗. 分布式控制系统动态重构技术研究与实现. 原子能科学技术, 2009, 43(8): 724-729.)
46 Zheng S, Zhang Q, Zheng R, Huang B Q, Song Y L, Chen X C. Combining a multi-agent system and communication middleware for smart home control:a universal control platform architecture. Sensors, 2017, 17(9): 2135. DOI:10.3390/s17092135
47 Liu Shuo, Wang Shuai, Meng Qing-Zhen, Ye Pei-Jun, Wang Tao, Huang Wen-Lin, Wang Fei-Yue. Parallel modeling of criminal subjects behavior based on ACP behavioral dynamics. Acta Automatica Sinica, 2018, 44(2): 251-261.
( 刘烁, 王帅, 孟庆振, 叶佩军, 王涛, 黄文林, 王飞跃. 基于ACP行为动力学的犯罪主体行为平行建模分析. 自动化学报, 2018, 44(2): 251-261.)
48 Chen D W, Yin J T, Chen L, Xu H Z. Parallel control and management for high-speed maglev systems. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(2): 431-440. DOI:10.1109/TITS.2016.2577037
49 Wu Sha-Ping, He Ji-Hong, Luo Xun-Jie. Handling technology design for automated container terminal of Yangshan deepwater port phase Ⅳ project. Port & Waterway Engineering, 2016(9): 159-162, 166.
( 吴沙坪, 何继红, 罗勋杰. 洋山四期自动化集装箱码头装卸工艺设计. 水运工程, 2016(9): 159-162, 166. DOI:10.3969/j.issn.1002-4972.2016.09.033)
50 Liu Guang-Hong, Cheng Ze-Kun, Luo Xun-Jie, Zhuang Hua, He Ji-Hong. General layout of fully automated container terminal in phase Ⅳ of Yangshan project. Port & Waterway Engineering, 2016(9): 46-51.
( 刘广红, 程泽坤, 罗勋杰, 庄骅, 何继红. 洋山四期工程全自动化集装箱码头总体布置. 水运工程, 2016(9): 46-51. DOI:10.3969/j.issn.1002-4972.2016.09.010)
51 Cheng Ze-Kun, Liu Guang-Hong, He Ji-Hong. Innovation on general layout of fully-automated container terminal in Yangshan Port phase Ⅳ project. China Harbour Engineering, 2016, 36(10): 1-7.
( 程泽坤, 刘广红, 何继红. 洋山港四期全自动化集装箱码头总体布置创新. 中国港湾建设, 2016, 36(10): 1-7. DOI:10.7640/zggwjs201610001)
52 Li D L, Niu K. Dijkstra's algorithm in AGV. In:Proceedings of the 9th IEEE Conference on Industrial Electronics and Applications. Hangzhou, China:IEEE, 2014. 1867-1871
53 Gayathri N, Chandrakala K R M V. A novel technique for optimal vehicle routing. In:Proceedings of the 2014 International Conference on Electronics and Communication Systems. Coimbatore, India:IEEE, 2014. 1-5
后记:本文于发表于2019年《自动化学报》第45卷,第3期。













https://m.sciencenet.cn/blog-2374-1174742.html
上一篇:[转载]IEEE/CAA JAS热点综述集锦
下一篇:[转载]智能陷阱:聪明人为何犯愚蠢的错误