博文
最新成果┃Science Robotics:亚毫米尺度、多材料集成的遥控步行机器人
||
近日《Science Robotics》上发表重要研究成果:可以遥控的步行机器人!北京大学未来技术学院韩梦迪研究员、北京理工大学郭晓岗副教授、以及北京大学微电子研究院博士毕业生陈学先为论文的第一作者,iCANX Talks第1期报告人--美国西北大学John A. Rogers院士和他的合作伙伴黄永刚院士、以及清华大学张一慧教授(iCANX Talks第22期报告人)为本论文的通讯作者。

文章简介
亚毫米尺度的机器人在很多领域能够发挥重要作用,可作为医学中的微创外科手术器械或生物学研究中用于操纵细胞/组织的工具。然而,由于加工方法的局限性,亚毫米尺度的机器人的结构和材料种类相对单一,导致机器人的运动模态受限,很多性能指标都无法与大型机器人相媲美。最明显的一点是:当尺寸在毫米以下时,大部分机器人仅能在液体环境中运动,或者必须依赖特殊构造的固体表面实现简单的定向运动,无法实现远程、可控的多放向、多模态运动。为了解决上述问题,本工作提出了亚毫米尺度机器人的新型制造方法和驱动模式,融合半导体工艺和三维屈曲技术实现了具有复杂三维构型和异质材料集成的微型机器人。所实现的运动和操纵模式包括弯曲、扭转、膨胀、直线/曲线爬行、行走、转弯、跳跃等。通过在微型机器人上方增加角锥棱镜和变色材料,可以实现无线监测和自我定位。
图文导读

图一:具有复杂三维形貌的亚毫米尺度机器人。(A)微型螃蟹机器人示意图;左图为多层平面图形,右图为三维结构示意图。(B)微型机器人的加工流程示意图。(C)机器人运动原理的有限元仿真结果。(D)位于硬币侧沿的微型螃蟹机器人。(E)不同形貌的三维机器人照片;上图为有限元仿真结果;下图为实验结果。(F)多个微型螃蟹机器人光学照片。(G)微型螃蟹机器人的运动模式;左图为从左向右的定向运动,右图为从右向左的定向运动。
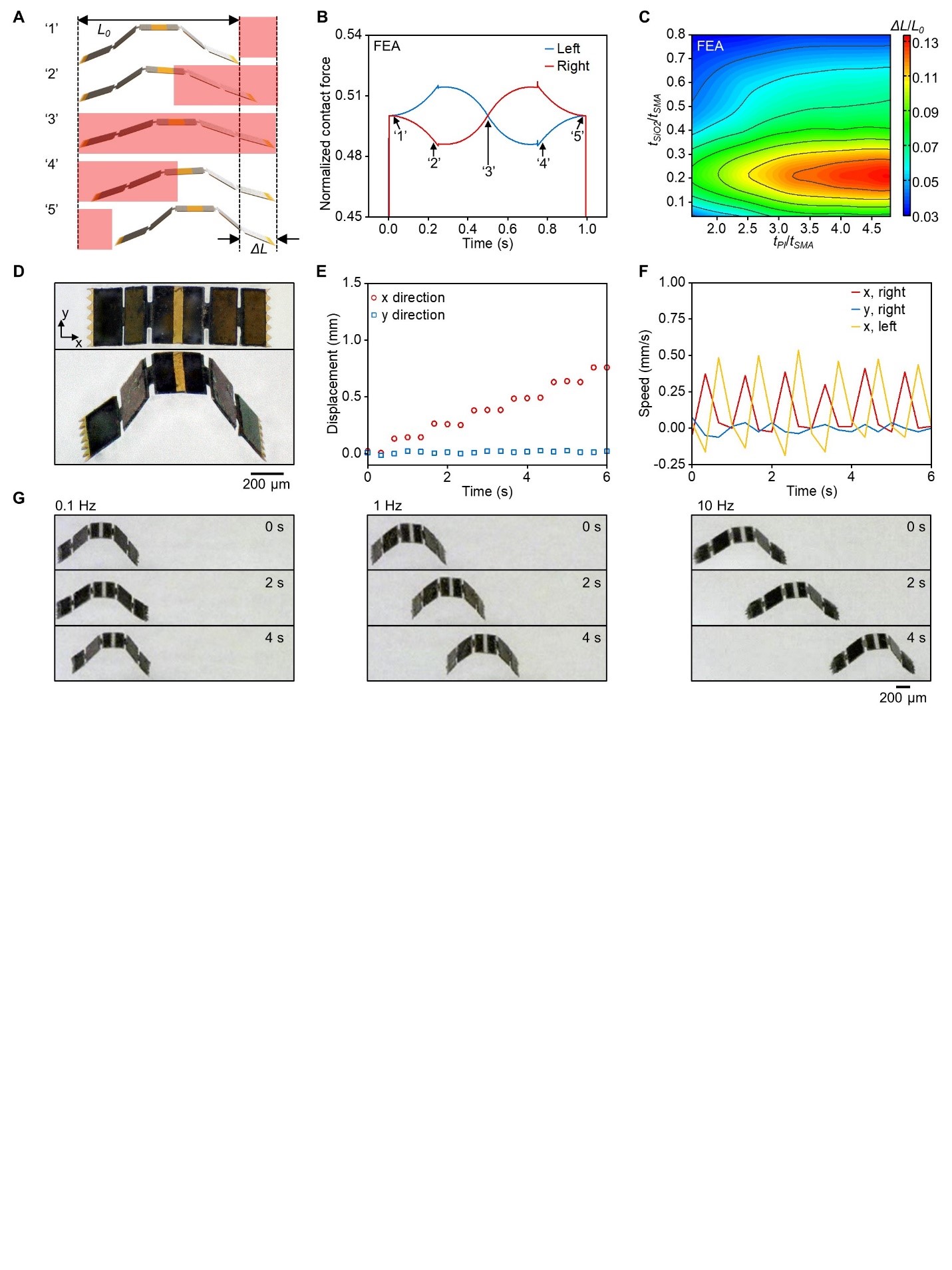
图二:机器人的机理分析、优化设计和性能表征。(A)激光扫描加热原理示意图。(B)激光扫描不同区域时机器人两侧的支持力曲线图(有限元仿真结果)。(C)机器人单个周期移动的距离与各层薄膜厚度的关系(有限元仿真结果)。(D)三维条带机器人的光学照片。(E)机器人在x和y方向的位移曲线。(F)机器人左右两端在x和y方向的速度曲线。(G)不同激光扫描频率下条带机器人的运动情况。
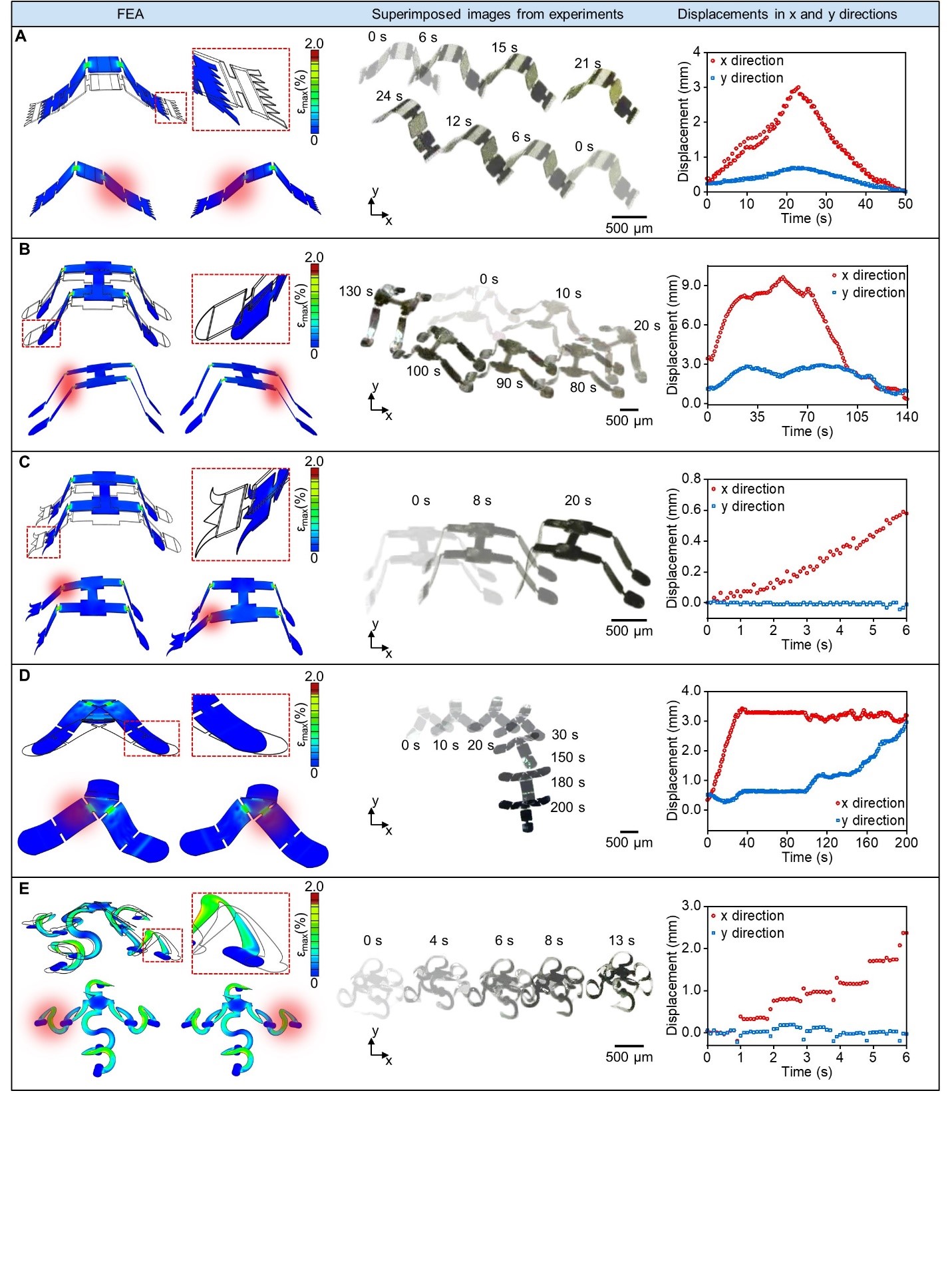
图三:不同形貌和运动模态的三维机器人。(A)双向直线爬行运动。(B)双向曲线爬行运动。(C)通过轮流加热不同条带实现的行走运动模式。(D)通过改变激光扫描方向实现的转弯运动模式。(E)跳跃运动模式。在图(A)-(E)中,左侧为有限元仿真结果,中间为实验测试照片,右侧为测试曲线。

图四:不同机器人的尺寸与速度对比。
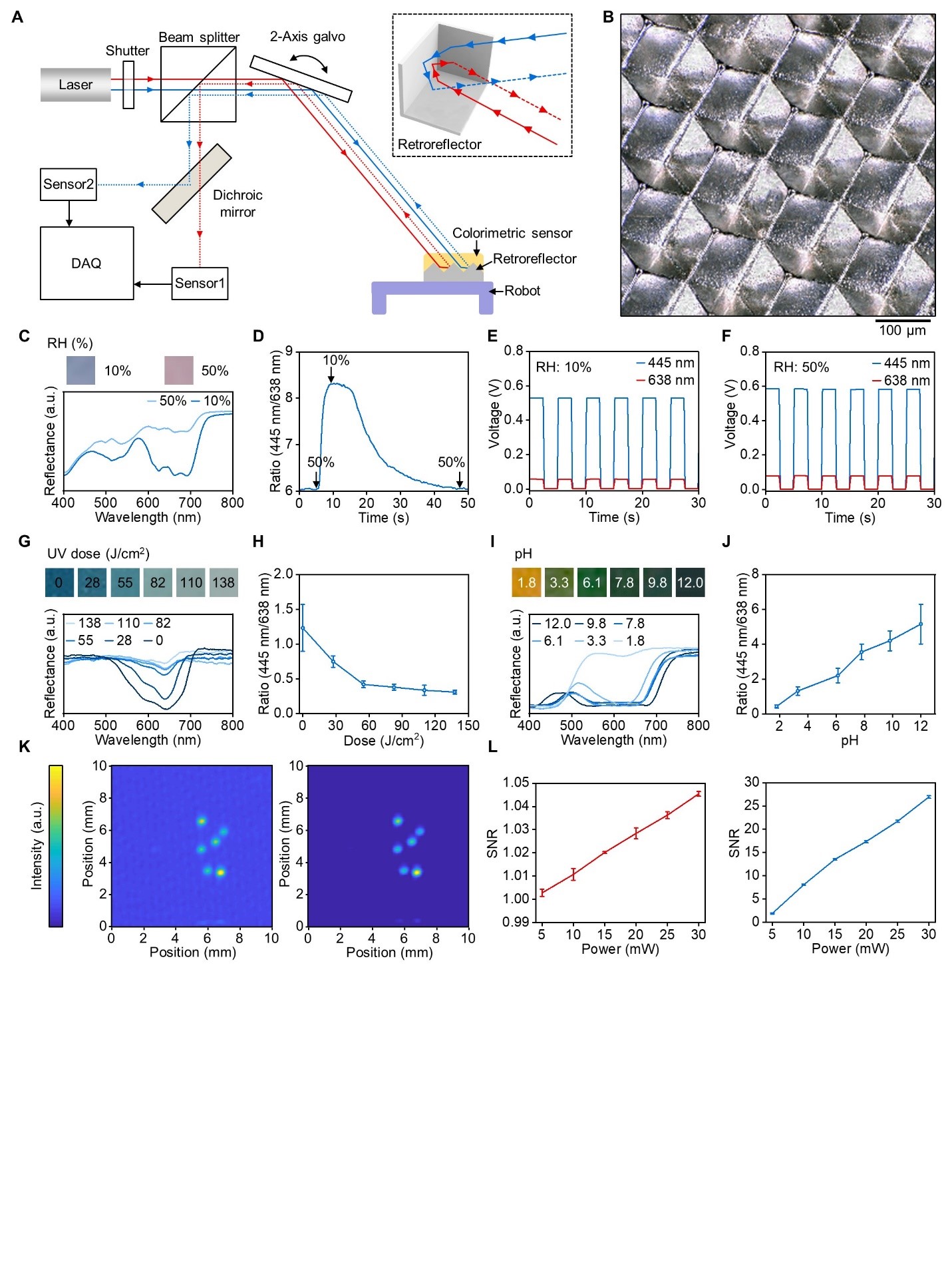
图五:机器人的遥测和自我定位功能。(A)用于遥测的光学系统示意图;插图为角锥棱镜结构示意图。(B)角锥棱镜阵列光学照片。(C)上图为可变色材料在不同湿度下的光学照片,下图为不同湿度下的反射率。(D)湿度变化时光电探测器输出信号的比值。(E-F)不同湿度下光电探测器的时域输出曲线。(G)上图为可变色材料在不同紫外辐照剂量下的光学照片,下图为不同紫外辐照剂量下的反射率。(H)光电探测器输出信号的比值与紫外辐照剂量的关系。(I)上图为可变色材料在pH值下的光学照片,下图为不同pH值下的反射率。(J)光电探测器输出信号的比值与pH值的关系。(K)明场与暗场条件下机器人的定位效果。(L)明场与暗场条件下机器人定位的信噪比。
https://m.sciencenet.cn/blog-299-1341906.html
上一篇:祝福考生︱向圣斗士纳达尔一样去战斗
下一篇:张海霞┃莫让疫情成为你的挡箭牌