ВЉЮФ
ЛљгкЕЅЩљЪИСПДЋЩљЦїащФтРЉеЙЕФЖрЛњЖЏЩљФПБъИњзйЫуЗЈ
|
в§гУБОЮФ
еХО§, БЋУї, едОВ, ГТжОЗЦ, бюНЈЛЊ. ЛљгкЕЅЩљЪИСПДЋЩљЦїащФтРЉеЙЕФЖрЛњЖЏЩљФПБъИњзйЫуЗЈ. здЖЏЛЏбЇБЈ, 2023, 49(2): 383−398 doi: 10.16383/j.aas.c220172
Zhang Jun, Bao Ming, Zhao Jing, Chen Zhi-Fei, Yang Jian-Hua. Multi-maneuvering acoustic targets tracking algorithm based on virtual extension of single acoustic vector sensor. Acta Automatica Sinica, 2023, 49(2): 383−398 doi: 10.16383/j.aas.c220172
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c220172
ЙиМќДЪ
ЩљЪИСПДЋЩљЦїЃЌИпНзРлЛ§СПЃЌащФтРЉеЙЃЌЙувхБъЧЉЖрВЎХЌРћТЫВЈЃЌЖрФПБъИњзй
еЊвЊ
ЮЊНтОіЕЅЩљЪИСПДЋЩљЦї(Acoustic vector sensor, AVS)ПЩИњзйЩљФПБъЪ§ФПЩйЁЂИњзйадФмВюЕФЮЪЬт, ЬсГіСЫЛљгкAVSащФтРЉеЙЕФЖрЛњЖЏЩљФПБъИњзйЫуЗЈ. ЪзЯШ, в§ШыИпНзРлЛ§СПдЄДІРэЙ§ГЬВЂНЈСЂИпНзЫЦШЛКЏЪ§, ВЛНіФмЙЛвжжЦИпЫЙдыЩљЁЂЬсИпЙРМЦОЋЖШ, ЛЙПЩЭЈЙ§AVSЕФащФтРЉеЙдіМгПЩИњзйФПБъЪ§ФП. ШЛКѓ, дкБпдЕЛЏІФЙувхБъЧЉЖрВЎХЌРћ(Marginalized ІФ-generalized label multi-bernoulli, MІФ-GLMB)ТЫВЈПђМмЯТ, ЬсГіСЫЛљгкРлЛ§СПЕФдіЙудЫЖЏФЃаЭзДЬЌЕФMІФ-GLMB (Cumulants-based augumented motion model state MІФ-GLMB, Cum-AMMS-GLMB)ЫуЗЈ. ЫуЗЈв§ШыЖржждЫЖЏФЃаЭ, ВЂНЋБэеїВЛЭЌФЃаЭЕФЫїв§БъКХзїЮЊФПБъзДЬЌЕФдіЙуВЮЪ§, ЭЈЙ§ИїФЃаЭМфЕФМгШЈЛьКЯЛёШЁгХгкЕЅвЛдЫЖЏФЃаЭЕФИњзйадФм. Г§ДЫжЎЭт, ЫуЗЈЕФађЙсУЩЬиПЈТх(Sequential Monte Carlo, SMC)ЪЕЯжЙ§ГЬжа, вРОнИпНздЄДІРэЛёЕУЕФЙщвЛЛЏПеМфЦзФтКЯМьВтИХТЪКЏЪ§, вжжЦСЫдгВЈЯђПЩгУСЃзгРЉеЙ, НјвЛВНдіЧПСЫИпЫЦШЛЧјгђЕФСЃзг. зюКѓ, ЭЦЕМСЫAVSФПБъИњзйЕФКѓбщПЫРУРТоЯТНч(Posterior crameЁфr-rao lower bound, PCRLB), ВЂЭЈЙ§ЗТецЪЕбщбщжЄСЫЫуЗЈЕФСПВтдыЩљвжжЦФмСІКЭЩљФПБъИњзйадФм.
ЮФеТЕМЖС
ЩљЪИСПДЋЩљЦї(Acoustic vector sensor, AVS)ПЩЭЌВНВтСППеМфвЛЕуДІЩљбЙКЭЕбПЈЖћзјБъЯЕШ§Иіе§НЛЗНЯђЩЯЕФЩљжЪЕуеёЫйаХЯЂ[1-4]. ЕЅИіAVSРћгУЦфЖдЦЕТЪВЛУєИаЕФЁА8ЁБзжаЮжИЯђад, МДПЩЪЕЯжашгЩЖрИіЩљбЙДЋЩљЦїзщГЩеѓСаВХПЩЪЕЯжЕФЩљдДВЈДяЗНЯђ(Direction-of-arrival, DOA) ЙРМЦ. МјгкAVSЕФаЁГпДчБуаЏЁЂЩљГЁаХЯЂЛёШЁЕШЗНУцЕФгХЪЦ, вђДЫЮЊЛњЦїШЫЬ§ОѕИажЊЯЕЭГЕФЗЂеЙЬсЙЉаТЫМТЗ.
НќФъРД, зюДѓЫЦШЛ[5]ЁЂВЈЪјаЮГЩ[6]ЁЂЛљгкзгПеМфЗжНтЕФMUSIC[7-8]ЁЂESPRIT[9-10]ЕШЫуЗЈвбЙуЗКгУгкЛљгкAVSЕФDOAЙРМЦЮЪЬт. ОЁЙмаЁГпДчAVSПЩЪЕЯжDOAЙРМЦ, ЕЋЦфПзОЖвЛЖЈГЬЖШЩЯЯожЦСЫНЧЗжБцТЪ. ИпНзРлЛ§СПДІРэЪжЖЮЕФв§Шы[11], ПЩЭЈЙ§AVSащФтРЉеЙКЭСПВтдыЩљвжжЦДяЕНЬсИпDOAЙРМЦОЋЖШЕФФПЕФ. ЪЕМЪГЁОАжаЖрЮЊдЫЖЏЩљФПБъ, ЧвАщЫцФПБъГіЩњЁЂЫРЭі, ФПБъЪ§ФПЪЧЪББфЕФ. ШЛЖј, ЩЯЪіЫуЗЈжївЊеыЖдЙЬЖЈЪ§ФПЕФОВжЙЩљФПБъDOAЙРМЦ, ЧвЮДПМТЧЯрСкЪБМфВНФПБъзДЬЌЕФИпЖШЯрЙиад.
ЛљгкЫцЛњгаЯоМЏ(Random finite set, RFS)РэТлЕФФПБъИњзйЗНЗЈ[12] ПЩНтОіЪББфЖрФПБъИњзйЮЪЬт. ИУРрЗНЗЈНЋЖрФПБъзДЬЌКЭСПВтНЈФЃЮЊRFS, ВЂЭЈЙ§ЖрФПБъБДвЖЫЙТЫВЈДЋЕнЖрФПБъКѓбщИХТЪ, ДгЖјДяЕНФПБъЪ§ФПгызДЬЌВЮЪ§ЙРМЦЕФФПЕФ. ФПЧАГЃгУЕФгаИХТЪМйЩшУмЖШ(Probability hypothesis density, PHD) [13-15]ЁЂЪЦИХТЪМйЩшУмЖШ(Cardinalized PHD, CPHD)[16]ЁЂЖрФПБъЖрВЎХЌРћ(Multi-target multi-Bernoulli, MeMBer)[17-20]вдМАЙувхБъЧЉЖрВЎХЌРћ(Generalized label multi-Bernoulli, GLMB)[21-26] ЕШТЫВЈЦї. етаЉЫуЗЈФмЙЛБмУтШчЖрФПБъМйЩш[27]ЁЂСЊКЯИХТЪЪ§ОнЙиСЊ[28]ЕШЫуЗЈЕФЪ§ОнЙиСЊ, МЋДѓГЬЖШЩЯНЕЕЭМЦЫуИДдгЖШ, ЬсИпФПБъИњзйОЋЖШгыЪЕЪБад. дкЛљгкAVSЕФФПБъИњзйЪЕЯжжа, ЮФЯз[29-32]ВЩгУRFSРДУшЪізДЬЌЙ§ГЬЕФЫцЛњад, ВЂЭЈЙ§СЃзгТЫВЈЪЕЯжЪББфЖўЮЌDOAЙРМЦ. ЮФЯз[33]НЋMeMBerТЫВЈЦїв§ШыЕЅИіAVSЕФФПБъИњзйжа, ЪЕЯжСЫСНИіВЛЭЌЦЕТЪеДјФПБъМьВтгыИњзй. ЮФЯз[34]дђНјвЛВНв§ШыНЛЛЅЪНЖрФЃаЭ(Interacting multiple model, IMM)КЭжИЪ§МгШЈЕФMUSICЮБЦзЫЦШЛКЏЪ§вдЬсИпИњзйОЋЖШ. ШЛЖј, ЩЯЪіЛљгкЕЅИіAVSЕФФПБъИњзйЫуЗЈзюЖрЪЕЯжЫЋдДИњзй, ЧвЮоЗЈЗжБцИїФПБъЕФКНМЃаХЯЂ.
ЛљгкБъЧЉRFSРэТлЕФGLMBЁЂІФ-GLMBЁЂMІФ-GLMB[35, 36]ЕШТЫВЈЦїЭЈЙ§в§ШыКНМЃБъЧЉаХЯЂ, ПЩНтОіЦфЫћЗЧБъЧЉRFSТЫВЈЦїЮоЗЈЧјЗжФПБъКНМЃЕФЮЪЬт. MІФ-GLMBТЫВЈЦїзїЮЊвЛжжНќЫЦЕФІФ-GLMBЗНЗЈ, ЭЈЙ§ЖдСПВт−КНМЃЕФЙиСЊгГЩфжДааБпдЕЛЏДІРэ, ФмЙЛМѕЩйКНМЃМйЩшЪ§ФПЁЂНЕЕЭМЦЫуГЩБО. МјгкДЫ, БОЮФдкMІФ-GLMBТЫВЈПђМмЯТЩшМЦAVSащФтРЉеЙЕФЖрЛњЖЏЩљФПБъИњзйЫуЗЈ, МДCum-AMMS-GLMBЫуЗЈ, вдНтОіAVSПЩИњзйЩљФПБъЪ§ФПЩйЁЂЕЭаХдыБШЯТИњзйадФмВюЕФЮЪЬт. ИУЫуЗЈжївЊЙБЯзЮЊ:
1)ИпНзРлЛ§СПдЄДІРэЕФЬсГі, ФмЙЛвжжЦИпЫЙСПВтдыЩљ, ЬсИпФПБъИњзйОЋЖШ. Г§ДЫжЎЭт, ИпНзЫЦШЛЕФЩшМЦПЩЪЕЯжAVSащФтРЉеЙ. гыЯжгаЛљгкПеМфЦзЮБЫЦШЛЕФAVSИњзйЫуЗЈЯрБШ, ПЩдіМгПЩИњзйФПБъЪ§ФП.
2)ЪЕМЪГЁОАжа, ецЪЕЩљФПБъЕФдЫЖЏЙьМЃЮоЗЈгЩЕЅвЛдЫЖЏФЃаЭУшЪі. Cum-AMMS-GLMBЫуЗЈдкMІФ-GLMBПђМмЯТЧЖШыIMMЫМЯы, НЋБэеїВЛЭЌдЫЖЏФЃаЭЕФЫїв§зїЮЊРЉеЙзДЬЌ, ЭЈЙ§ИїФЃаЭМфЕФМгШЈИќаТЬсИпИњзйадФм. гыЯжгаIMM-GLMBЫуЗЈ[37-39]ВЛЭЌ, ИУЫуЗЈСПВтЮЊЩљФПБъЛьКЯаХКХ, ЮоашЖюЭтв§ШыКНМЃ−СПВтЕФЙиСЊгГЩф, ФмЙЛНЕЕЭТЫВЈжїЬхЕФДцДЂШнСПКЭМЦЫуГЩБО, ЕжЯћдЄДІРэЙ§ГЬЕФВПЗжМЦЫуИКЕЃ.
3)ЪЕМЪЧщПіЯТаТЩњФПБъЯШбщЮДжЊЁЂЧвМьВтИХТЪПЩЪББф. ЫуЗЈЪЕЯжЙ§ГЬжаЩшМЦСЫаТЩњФПБъЬсШЁЁЂвдМАМьВтИХТЪФтКЯЗНЗЈ. ЦфжаМьВтИХТЪКЏЪ§ЭЈЙ§дЄДІРэЛёЕУЕФЙщвЛЛЏИпНзПеМфЦзФтКЯ, ПЩДяЕНвжжЦдгВЈЯђПЩгУСЃзгРЉЩЂЁЂдіЧПИпЫЦШЛЧјгђСЃзгЕФФПЕФ.
Г§вдЩЯжївЊЙБЯзЭт, БОЮФЛЙЭЦЕМСЫЖрФЃаЭНЛЛЅЕФAVSФПБъИњзйЕФPCRLB, ВЂЭЈЙ§ЪЕбщбщжЄСЫCum-AMMS-GLMBЫуЗЈЕФПЩааадКЭгааЇад.

ЭМ 1 ВЛЭЌаХдыБШЯТЕФЙщвЛЛЏИпНзЫЦШЛКЏЪ§ЪОР§
ЭМ 2 МьВтИХТЪФЃаЭ

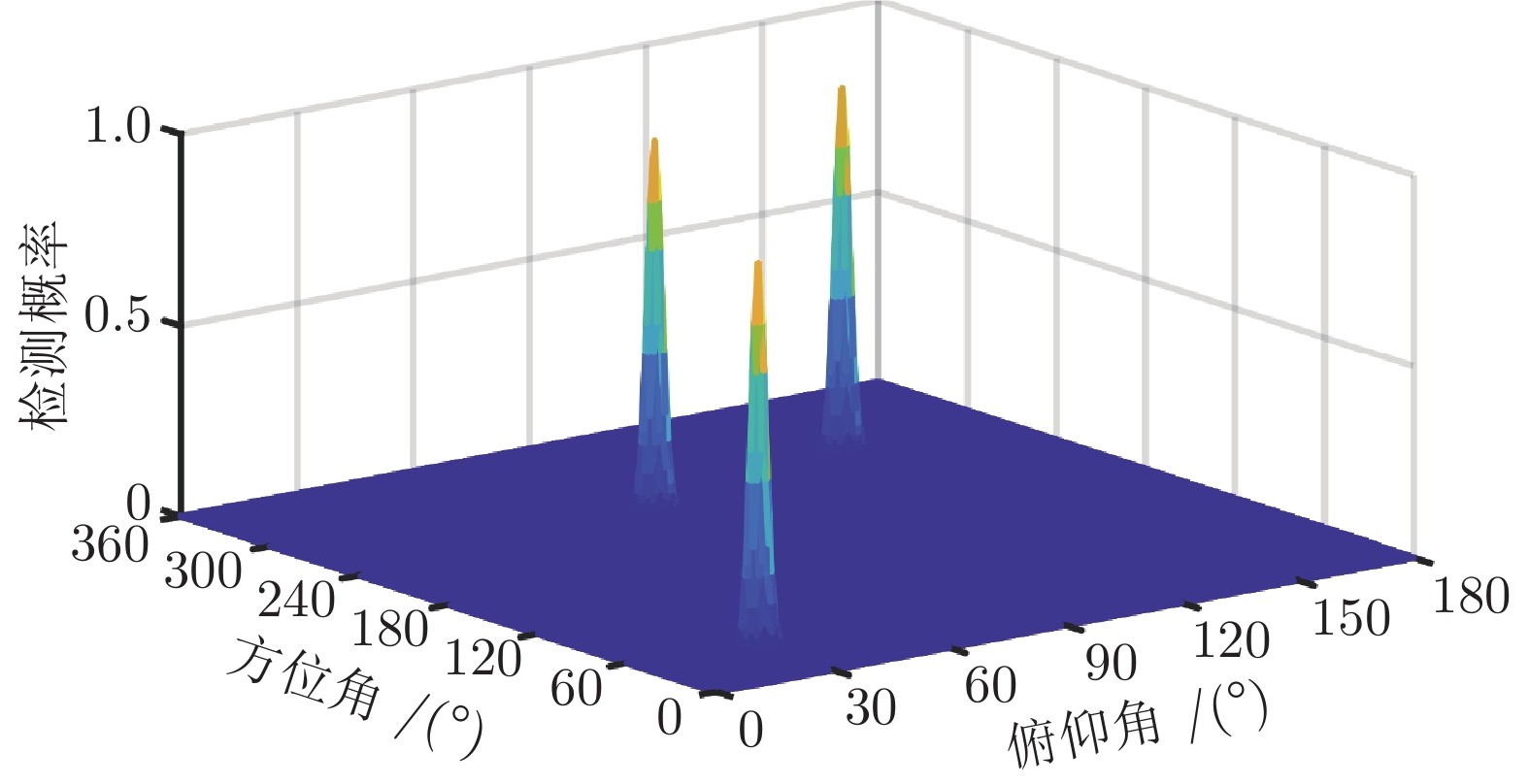
ЭМ 3 Cum-AMMS-GLMBЫуЗЈЕФЖрЩљФПБъИњзйНсЙћ
БОЮФЬсГіЕФЛљгкAVSЕФCum-AMMS-GLMBЫуЗЈ, НтОіСЫAVSПЩИњзйФПБъЪ§ФПЩйЁЂИњзйадФмНЯВюЕФЮЪЬт. ЫуЗЈжаИпНзРлЛ§СПдЄДІРэЕФв§ШыКЭИпНзЫЦШЛКЏЪ§ЕФНЈСЂ, ВЛНігааЇвжжЦСЫИпЫЙСПВтдыЩљ, ЛЙЭЈЙ§AVSЕФащФтРЉеЙ, ЬсИпСЫПЩИњзйЩљФПБъЪ§ФП. Cum-AMMS-GLMBЫуЗЈИќЪЪХфгкЩљФПБъдЫЖЏФЃаЭЖрбљЕФЪЕМЪГЁОА. дкMІФІФ-GLMBТЫВЈПђМмЯТ, ЫуЗЈЭЈЙ§ЖржждЫЖЏФЃаЭЕФМгШЈЛьКЯвдБЦНќФПБъЕФецЪЕдЫЖЏзДЬЌ, ЛёЕУСЫгХгкЕЅвЛдЫЖЏФЃаЭЕФИњзйаЇЙћ. ИУЫуЗЈЮоашв§ШыКНМЃ−СПВтЕФЙиСЊгГЩф, ФмЙЛНЕЕЭТЫВЈЦїЕФДцДЂШнСПКЭМЦЫуГЩБО, ДгЖјЕжЯћСЫдЄДІРэЙ§ГЬЕФВПЗжМЦЫуИКЕЃ. Г§ДЫжЎЭт, ЫуЗЈЭЈЙ§ЙщвЛЛЏИпНзПеМфЦзЪЕЯжЖдМьВтИХТЪКЏЪ§ЕФФтКЯ, діЧПСЫИпЫЦШЛЧјгђСЃзг, вжжЦСЫдгВЈЯђПЩгУСЃзгЕФРЉЩЂ. ЪЕбщбщжЄСЫЫуЗЈЕФПЩааадКЭгааЇад, ВЂЧвНЯвбгаЛљгкAVSЕФЩљФПБъИњзйЫуЗЈЕФадФмИќгХ. ЯдШЛЫљЬсаЁГпДчЁЂБуаЏAVSЕФЖрФПБъDOAИњзй, ЖдЮДРДЛњЦїШЫЬ§ОѕИњзйЯЕЭГЕФЩшМЦОпгаживЊВЮПММлжЕ.
зїепМђНщ
еХО§
ЮїББЙЄвЕДѓбЇздЖЏЛЏбЇдКВЉЪПбаОПЩњ. жївЊбаОПЗНЯђЮЊеѓСааХКХДІРэ. E-mail: zhangjun_2018@mail.nwpu.edu.cn
БЋУї
жаЙњПЦбЇдКЩљбЇбаОПЫљбаОПдБ. жївЊбаОПЗНЯђЮЊЪИСПДЋИаЦїгыДІРэ, жЧФмаХКХДІРэ. E-mail: baoming@mail.ioa.ac.cn
едОВ
жаЙњПЦбЇдКЩљбЇбаОПЫљЬиБ№баОПжњРэ. жївЊбаОПЗНЯђЮЊЪИСПДЋИаЦїЩшМЦ, ЩљбЇВтСП. E-mail: zhaojing@mail.ioa.ac.cn
ГТжОЗЦ
жаЙњПЦбЇдКЩљбЇбаОПЫљИБбаОПдБ. жївЊбаОПЗНЯђЮЊДЋИаЦїеѓСаДІРэ, ЩљдДЖЈЮЛКЭЩљбЇВтСП.E-mail: chenzhifei@mail.ioa.ac.cn
бюНЈЛЊ
ЮїББЙЄвЕДѓбЇздЖЏЛЏбЇдКНЬЪк. жївЊбаОПЗНЯђЮЊДЋИаЦїаХКХДІРэ, МьВтгыПижЦММЪѕ, ЗТЩњЛњЦїШЫКЭЩњЮявНбЇЭМЯёДІРэ. БОЮФЭЈаХзїеп. E-mail: yangjianhua@nwpu.edu.cn
https://m.sciencenet.cn/blog-3291369-1381788.html
ЩЯвЛЦЊЃККУЮФЗжЯэЉІSyn2RealгыSim2RealЃКЦНаабЇЯАЪгНЧЯТЕФЗжРргызлЪі
ЯТвЛЦЊЃКЦлЦЙЅЛїЯТОпБИвўЫНБЃЛЄЕФЖржЧФмЬхЯЕЭГОљжЕЧїЭЌПижЦ