博文
IJMSD | 德国斯图加特大学Peter Eberhard教授等:一种基于长短期记忆的无人机精确降落移动平台算法
||

图 文 导 读
无人机系统在近年得到了广泛应用。然而由于其有限的载荷和电源,无人机系统通常需要与其他平台合作来提高应用能力或拓展其应用范围,特别是与常见的地面移动机器人系统合作,此类组合通常被称为异构多机器人系统。对无人机而言,常见的需求是降落到移动平台进行充电或交接载荷。如何引导无人机精确降落于移动平台对多机器人系统具有重要意义。用于目标轨迹预测的传统机器学习方法是由过去采集的数据来预测未来轨迹,受限于神经网络的结构和数据采集,其可解释性较差且结果缺乏物理上的意义,易出现异常的或非连续的预测,同时对训练数据质量有较高要求。
为此,德国斯图加特大学骆炜博士、Henrik Ebel博士后和国际理论与应用力学联盟(IUTAM)前司库、国际多体系统动力学协会(IMSD)前主席、德国斯图加特大学Peter Eberhard教授在《国际机械系统动力学学报(英文)》(International Journal of Mechanical System Dynamics, IJMSD)发表“一种基于长短期记忆的无人机精确降落移动平台算法”研究论文,提出了一种结合机器学习和数据融合的运动目标轨迹预测算法,通过将基于LSTM神经网络模型的训练结果与卡尔曼滤波器相融合,降低了异常预测结果对具体实际应用的影响,从而提高了预测精度;进一步将所提出的轨迹预测方法应用于无人机精确降落仿真中,通过对移动平台的轨迹预测,引导无人机提前预判地面机器人的运动,从而实现对飞行轨迹的及时调整。仿真结果表明,无人机降落精度满足降落平台要求,保证了降落成功率。最后,在所有常见场景中,将所提出的方法与直接积分法、直接机器学习方法分别进行比较,结果表明该方法在所有场景中的降落精度最高。因此,所提出的结合机器学习和数据融合的运动目标轨迹预测算法提供了一种潜在的应用模式,即将基于数据挖掘的结果进行合理的运动学约束,可以进一步修正预测结果,以减少异常数据的影响。特别注意,该方法中使用的机器学习方法并不仅限于LSTM网络,数据融合方法也不仅限于卡尔曼滤波。
前 提 条 件
该文结合机器学习和数据融合的运动目标轨迹预测算法是基于以下前提条件提出的:
目标运动无需也不受无人机干扰。为了最大程度地提高合作效率并减少无人设备间的通讯,文中的移动平台执行其既定的运行轨迹;无人机无法通过任何方式知晓其未来的运动轨迹和意图,也无法要求其配合。
无人机可通过多种途径,包括全局定位设备,如GPS(较不精确)、机载摄像头(较精确)等获取目标平台当前和过去的位置。在降落的最后阶段,受机载摄像头可视角度的限制,无人机无法进一步获得移动平台的位置信息。
降落平台的运动轨迹具有潜在有意义的规律。该规律虽不为无人机所知,但可通过观察推导。完全随机的运动轨迹既无意义也无法被所提出的方法预测。
移动降落平台过去的运动轨迹可被存储并用于神经网络的训练。
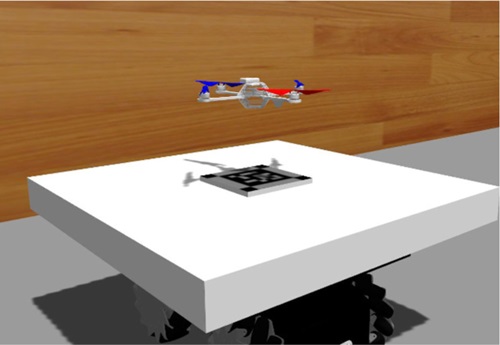
A machine learning-based method for the precise landing of an unmanned aerial vehicle on a moving mobile platform is proposed. The proposed approach attempts to predict the mobile platform's future trajectory based on the past states of the mobile platform. To that end, it combines a long short-term memory-based neural network with a Kalman filter. Hence, it aims at combining the advantages of a machine learning method with those of a state estimation method from established control theory. Based on the predicted trajectory, the unmanned aerial vehicle attempts to land precisely on the moving mobile platform. The experiment is conducted in the Gazebo simulation platform with a quadrotor and an omnidirectional mobile robot, and the proposed method is compared with the single-method approaches of using only either the Kalman filter or the machine learning method alone.
Keywords:
Kalman filter, long short-term memory (LSTM), trajectory prediction, unmanned aerial vehicle (UAV)
DOI: 10.1002/msd2.12036
Share this article:
https://onlinelibrary.wiley.com/doi/10.1002/msd2.12036
Cite this article: Luo W, Ebel H, Eberhard P. An LSTM-based approach to precise landing of a UAV on a moving platform. Int J Mech Syst Dyn. 2022;2(1): 99-107.
该文亮点:
提出了一种结合机器学习和数据融合的运动目标轨迹预测算法,提高了预测精度;
将所提出的方法应用于无人机精确降落仿真,保证了降落成功率;
在所有常见场景中,通过与其他两种方法比较发现,采用该文方法的无人机降落精度最高。
作 者 简 介
 骆 炜 德国斯图加特大学工程与计算力学所博士研究生,于2013年和2016年分别取得德国斯图加特大学机械专业本科和硕士学位,2014年取得武汉大学自动化本科学位。曾获中国国家公立留学奖学金资助。主要研究机器人及多体系统,特别是异构群体机器人的控制和应用。
骆 炜 德国斯图加特大学工程与计算力学所博士研究生,于2013年和2016年分别取得德国斯图加特大学机械专业本科和硕士学位,2014年取得武汉大学自动化本科学位。曾获中国国家公立留学奖学金资助。主要研究机器人及多体系统,特别是异构群体机器人的控制和应用。

Henrik Ebel 德国斯图加特大学工程与计算力学所博士后,IJMSD青年编委。于2014年和2016年分别取得德国斯图加特大学仿真技术专业本科和硕士学位;于2021年取得博士学位。主要研究多体动力学和控制理论在机械系统和多机器下的应用,多机器人协助以及基于优化方法的控制框架。
Peter Eberhard 自2002年起任德国斯图加特大学工程与计算力学所全职教授。曾任国际理论与应用力学联盟(IUTAM)库司,还曾任国际多体系统动力学协会(IMSD)以及德国力学委员会(DEKOMECH)主席。
Eberhard 自2002年起任德国斯图加特大学工程与计算力学所全职教授。曾任国际理论与应用力学联盟(IUTAM)库司,还曾任国际多体系统动力学协会(IMSD)以及德国力学委员会(DEKOMECH)主席。
期 刊 简 介

IJMSD由来自18个国家的20位院士、17位国际学会主席、20位国际期刊主编等69位科学家和国际出版巨头美国Wiley出版社合作创立。主编为南京理工大学芮筱亭院士,3位合作主编分别是加拿大皇家学会会士、加拿大工程院院士、欧洲科学院院士、加拿大麦吉尔大学Marco Amabili院士,国际理论与应用力学联盟(IUTAM)前司库、国际多体系统动力学协会(IMSD)前主席、德国斯图加特大学Peter Eberhard教授和美国工程院及科学院两院院士、欧洲科学院外籍院士、中国科学院外籍院士、美国工程科学协会前主席、美国西北大学Yonggang Huang院士。
IJMSD旨在用机械系统动力学科学与技术为现代装备设计、制造、试验、评估和使用全生命周期性能的提升提供先进的理论、软件、方法、器件、标准,为全球科学家和工程专家提供广泛的机械系统动力学国际交流平台。IJMSD强调从“系统”视角及系统级工具理解动力学,所涉及的机械系统不仅包括各种不同尺度的机械系统和结构,还包括具有多物理场/多学科特征的综合机械系统。
目前,IJMSD 已被ESCl, Scopus, Inspec, DOAJ等收录。2023年免收出版费,并为已录用稿件免费提供专业语言润色服务,欢迎全球科学家投稿交流。
期刊主页:
https://onlinelibrary.wiley.com/journal/27671402
投稿网址:
https://mc.manuscriptcentral.com/ijmsd
编辑部邮箱:office@ijmsd.net
长按下图,扫码添加小编微信,邀请您进入IJMSD读者交流群,群内不定期分享期刊论文,并开展学术写作讲座等各项活动。

备注“姓名-单位-IJMSD读者”

请长按二维码 关注IJMSD

https://m.sciencenet.cn/blog-3296863-1399883.html
上一篇:IJMSD | 西北工业大学周生喜教授等:基于颤振的风能俘获技术研究进展
下一篇:IJMSD | 杨昀副研究员、张卫红院士等:面向薄壁结构铣削颤振预测的结构时变动态特性高斯过程回归代理模型
全部作者的其他最新博文
- • IJMSD | 浙江工业大学金江明副教授:构建不对称强非线性结构声系统实现声能量非互易传递
- • IJMSD封面文章 | 青岛大学丁洁玉教授团队:基于多尺度微分代数神经网络的动力系统学习方法
- • IJMSD | 南京航空航天大学裘进浩教授团队:双向能量调节的压电分流阻尼技术及其对结构振动的抑制性能研究
- • IJMSD | 苏州大学凌明祥教授、华南理工大学张宪民教授,等:含曲轴柔性铰链的串并联柔顺机构传递矩阵建模方法
- • IJMSD Themed Collection | Vibration and Control (2022—2023)
- • IJMSD | 中国石油大学(华东)赵德敏副教授团队:温度对双层氮化硼拉伸和振动性能的影响