博文
水煮压缩感知中的测量矩阵
||
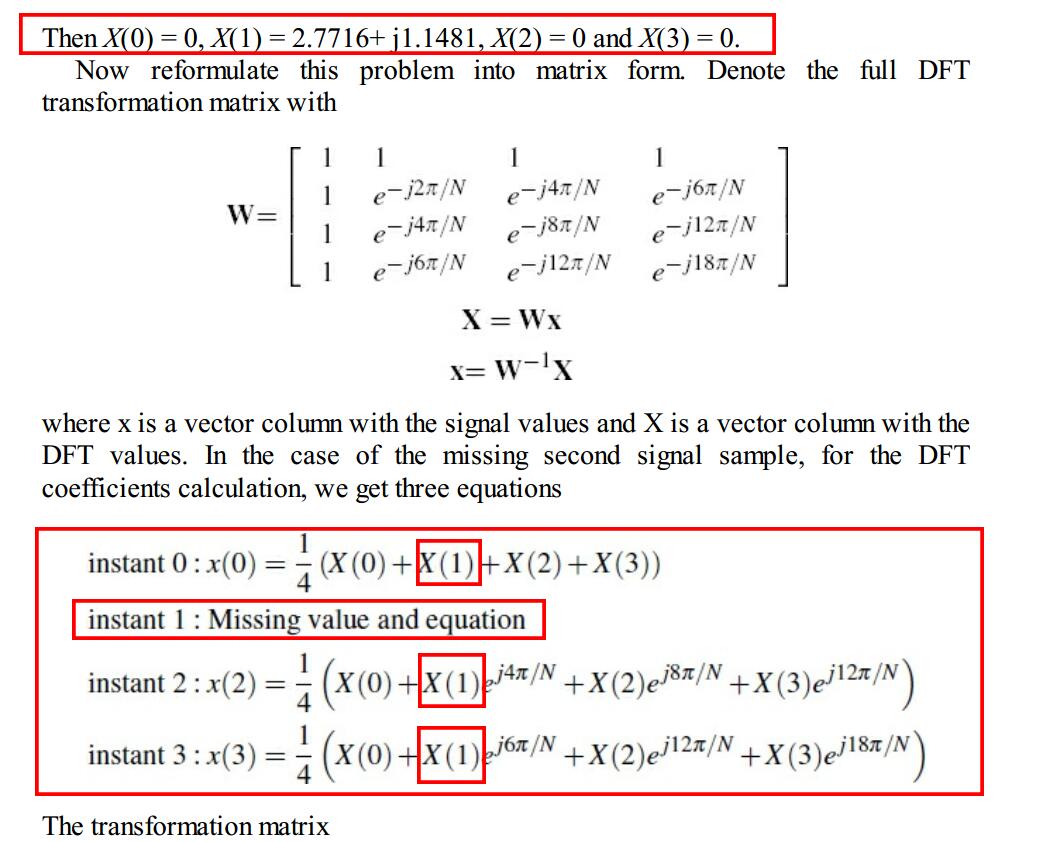
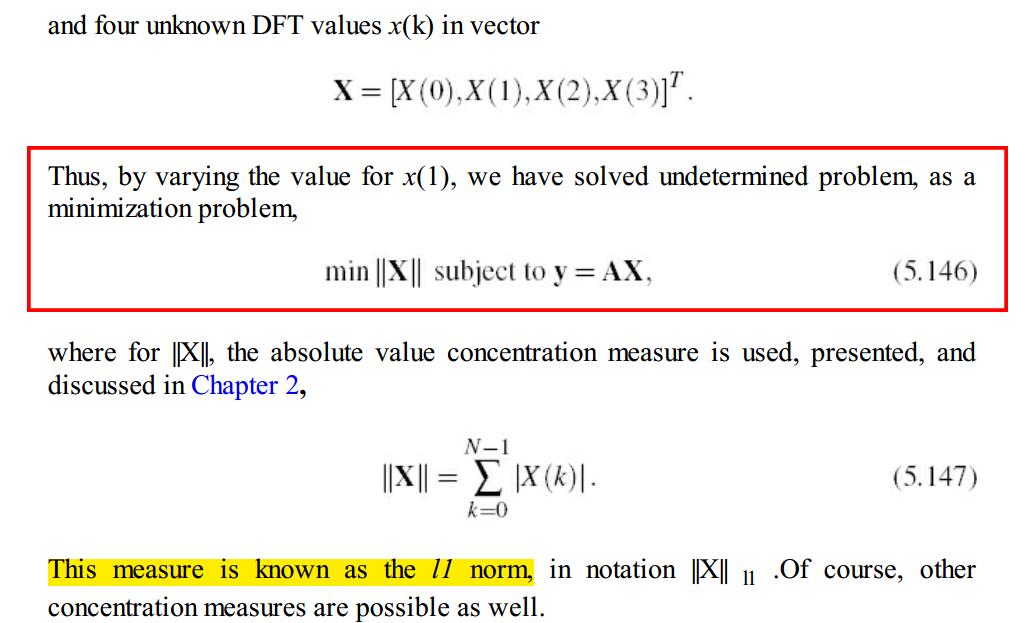
受到stankovic教授的启发,对压缩感知测量矩阵有了更加深刻的理解,在常见的压缩感知问题中,测量矩阵经常是个随机矩阵,比如均值为0,有一定方差的高斯分布矩阵,Bernoulli随机测量矩阵,亚高斯随机矩阵等等。那么是否意味着测量矩阵就应该是个随机矩阵呢?答案是否定的,关键问题在于你的测量信号到底如何得到,这个测量矩阵其实反应的就是测量规则,换句话说,一旦测量矩阵被确定下来,这个测量规则也就跟着确定了,其结果就是测量向量也跟着确定了,我们打个比方,种善因得善果,这个因就是你采取了什么样的测量矩阵,这个果就是你由于选择了这个测量矩阵导致的测量结果。反过来,如果我们已经知道了测量规则和测量结果,那么这个测量矩阵能不能是随意的呢?不能的,承接上面的比方,如果你得了善果,只能是因为你种了善因,也就是你的测量矩阵已经确定下来了。我们以缺失部分数据的DFT为例(详见附录),你有4个点,但是因为传感器故障,导致你随机地少了一个点,比如第二个点,那么你就需要建模x(0),x(2),x(3)三个时间点和X(0) ,X(1),X(2),X(3)四个频率点之间的关系,这个时候,虽然你少的点可以是随机的,但是你必须知道到底哪个点少了,那么对应的测量矩阵也就跟着确定下来了,所以虽然测量矩阵是随机的,但是本质上居然是确定的,这句话非常不好理解,我举个例子,你有N个时间点,你可以随机地丢掉部分点,但是,你丢掉的这些点的时间位置一旦被确知,那么你的测量矩阵就只能是确定的,而不同的缺失位置可以确定地得到不同的测量矩阵,在这个层面上理解,测量矩阵就是随机的,因为信号在哪些点上丢数据我事先确实不知道,有无数可能,嗯,所以随机,那么丢失完数据后呢,我人为地去找出到底哪些点是不可用的,在这个时候,测量矩阵的随机性就被去除了,从这个层面上看,测量矩阵在确知丢失信息点的时间位置后,该矩阵就不再是一个随机矩阵,而是确知矩阵。
总结:在数据采样前,任何时间点的数据都是可能丢失的,这时候测量矩阵确实是随机的,不可预测,一旦数据被随机地采样下来,有了采样记录,哪些时间点是缺失的就跟着采样的结束而盖棺定论了,因此,采样后的测量矩阵就是一个确定矩阵。
附录:
下面这则例子堪称经典,从DFT矩阵变换出发,立足信号稀疏特性,充分展示了压缩感知中的丢失测量,并精彩地将数据重构问题用经典的1范数正则化加以约束,让我们对压缩感知中的丢失测量和稀疏重构有了一个非常直观的认识,而且从最简单的DFT入手,有极强的亲切感。下面有请stankovic为我们做精彩报告。



https://m.sciencenet.cn/blog-684084-1010032.html
上一篇:从meanshift目标跟踪到粒子滤波
下一篇:压缩感知浅析