博文
GNSS术语理解——Geososo微信群2020-03-16聊天记录整理
|||
Geososo是一个地信测绘、卫星导航领域从业人员的微信群,群内有工程师、高年级研究生、企业家(创业者)、产品研发、高校老师等圈内大佬,群里活跃的讨论着各种GNSS相关的话题。
本文梳理了Geososo在2020-03-16日群内讨论的GNSS技术话题中涉及到的诸多术语,大家一起学习。
名词解释:
1、QZSS:准天顶卫星系统(日语:准天顶卫星システム,英文:Quasi-Zenith Satellite System;缩写:QZSS);QZSS第一阶段包括3颗倾斜同步轨道卫星和1颗地球同步轨道卫星,目前已经完成4颗卫星的部署。第一颗技术试验卫星“指路者Michibiki”于2010年9月11日发射,剩下3颗QZS-2、QZS-3、QZS-4分别于2017年6月1日、2017年8月19日、2017年10月10日发射,其中QZS-3是地球同步轨道卫星,其余3颗是倾斜同步轨道卫星。。据《日本时报》网站报道,它可提供精度达到10厘米以下的全球最高水平定位信息。
QZSS官网:https://qzss.go.jp/
知乎-如何评价日本版的 GPS「准天顶卫星系统(QZSS)」?
http://reader.s-reader.com/article/a4/3443900.html
2、CLAS:Centimeter Level Augmentation Services,是由QZSS提供的厘米级定位增强服务
日本三菱电机基于此技术开展自动驾驶研究:
https://auto.gasgoo.com/News/2017/10/1910140014070025402C601.shtml
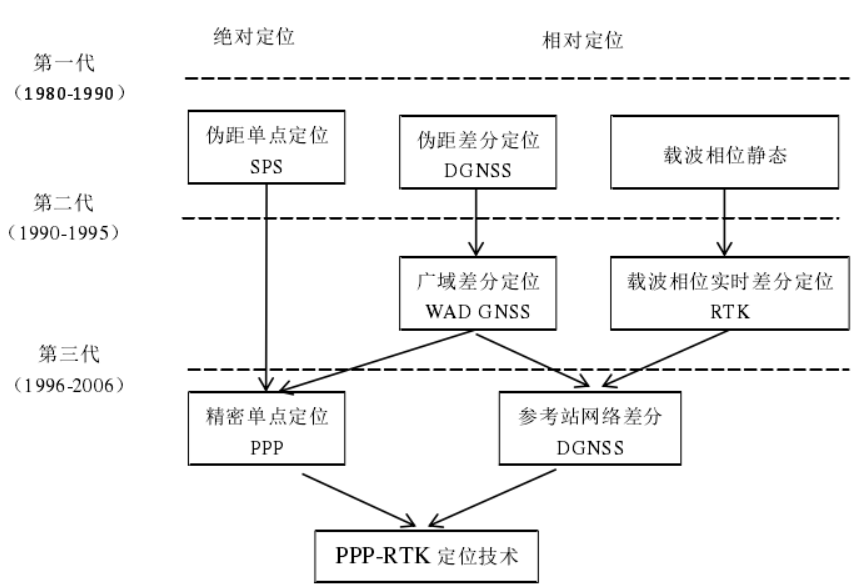
3、PPP:Precise Point Positioning,精密单点定位是采用精密卫星星历、卫星钟差数据和单台双频接收机采集的码及相位观测值,利用非差模型进行定位的方法。
PPP采用非差方式无法消除卫星端和接收机端的硬件延迟与初始相位偏差,统称为相位未校准硬件延迟(Uncalibrated Phase Delays,UPD),而 UPD 与模糊度强相关使得UPD 和模糊度无法分离,导致模糊度失去整数特性无法固定,因此,通常PPP采用模糊度实数解。
由于伪距噪声影响以及卫星的空间几何变化缓慢,因此PPP 的首次收敛和再次收敛时间比较长,一般需要观测(30-60min)才能收敛到10cm的定位精度。
4、RTK:Real time kinematic,实时动态载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。
5、PPP-RTK:由于非差观测值中未校准硬件延迟(UPD)的影响,PPP模糊度估值通常为浮点解。PPP-RTK技术旨在从模糊度浮点解中分离出UPD参数,使模糊度得以固定,以提高PPP收敛速度和定位精度。
PPP-RTK是Wubbena 在2005年提出的,这个技术利用区域参考站坐标精确已知的优势,并充分利用广域参考网所提供的实时状态空间参数和各种误差模型,解算影响非差模糊度固定的改正信息并播发给用户,实现全球或区域的精密单点定位。这种方式充分融合了网络RTK和PPP技术的优势,主要有两大特点,一是极大的提高了静态和动态PPP定位的精度和收敛的速度,二是拓展了网络RTK的服务范围,用户在参考网外仍可获得与网内相当的定位精度,是目前相关研究的热点。PPP-RTK的难度在于非差模糊度中未校准硬件延迟参数的分离上。通常UPD可以分为整周部分和小数部分(Fractional Cycle Biases,FCBs),其中UPD的整数部分为常整数,不会破坏模糊度整数特性,因此只需对FCBs和模糊度进行分离,便能恢复模糊度的整数特性。
6、PPP-AR:PPP ambiguity resolution,PPP模糊度固定解算,GFZ的葛茂荣教授2008年首次提出PPP-AR方法。
7、PPP-WAR:一种三频单历元单点定位宽巷模糊度固定(PPP wide-lane ambiguity fixing method,PPP-WAR)方法,基于该方法的城市环境车载动态定位结果与广域伪距增强精密定位方法( 采用伪距和相位观测值并经过精密钟差轨道产品改正, 单个历元解算) 相比有显著提高, 定位精度可达分米级。
8、GEO++:
![]()
Gerhard Wübbena博士获得了汉诺威大学的大地测量学位。他自1983年以来一直在全球定位系统领域工作。他于1990年创立了Geo++®公司,开发卫星导航和定位软件及系统。其中包括后处理系统GEONAP和实时系统GNSMART。
GEO++公司一直专注于卫星定位的研究和发展。目前的集中在高精度RTK相位定位(GNSMART)、GPS站校准项目和实时变形监测系统。
GEO++还推出了可以在Android系统输出原始GNSS观测数据的APP——GEO++ RINEX Logger;
值得注意的是,QZSS底层技术支持是GEO++,该公司做的总体设计。
博世、Geo++、三菱电机及u-blo创建合资公司 旨在提供高精度GNSS全球定位服务:
https://auto.gasgoo.com/News/2017/08/0904004104170020083C601.shtml
9、TRIMBLE:

天宝导航公司成立于1978年,数十年来一直在GNSS技术开发和实际应用方面处于行业领先地位。在过去3年里超过1亿5千万的资金投入,使Trimble始终保持着测绘技术的领先地位,并使定位技术与我们的日常生活紧密结合起来。拥有超过512项的已注册GNSS专利是Trimble引以为傲的技术基石,并以先进耐用的特点确立了牢固的市场地位。
Trimble的技术在导航,精确授时,无线网同步,高精度大地工程综合解决方案,精准农业等方面发挥着不可替代的作用。多年来Trimble公司一直致力于高精度连续运行基准站GPS设备的研制工作。新技术的应用使Trimble的设备在世界范围内广泛应用于地震-板块运动监测,沉降变形监测,气象观测,等高精度应用领域。VRS虚拟参考站技术的出现更使固定GPS观测网具有提供多种服务的能力,使GPS网内的交通,测绘,环保,市政,勘探,管线等所有需要定位的用户得到服务,大大提高了网络利用率和城市管理水平。
10、Leica Geosystems:
![]()
徕卡测量系统在测量解决方案的创新设计方面拥有近200年的历史,其产品和服务深受全球专业人士信赖,能够帮助用户采集、分析和显示空间信息。
徕卡测量系统的便携式梳子显微镜结合了高端光学与数字技术创新的宏观和微观成像,能进行快速定量的二维和三维表面测量,为支持研发和质量控制打开新的视野。
2005年被瑞士海克斯康(Hexagon)集团收购。
全球GNSS高精度知名企业有很多,比如:Trimble、Topcon、Leica、Geo++、ublox、Navcom、上海司南等等,为啥重点介绍上面三家企业,因为在网络RTK方面(CORS),TRIMBLE、GEO++和Leica分别提出了三种算法:
连续运行参考站系统(Continuous Operational Reference System,简称CORS系统)可以定义为一个或若干个固定的、连续运行的GPS/GNSS参考站,利用现代计算机、数据通信和互联网(LAN/WAN)技术组成的网络,实时地向不同类型、不同需求、不同层次的用户提供经过检验的不同类型的GPS观测值(载波相位,伪距),各种改正数、状态信息,以及其他有关GPS服务项目的系统。它是目前城市GPS测量技术发展的热点,是网络RTK技术和GPS主板技术的发展的产物,它的产生弥补了一些传统的RTK的不足,促进了GPS在测量和其他领域的应用。
国内外应用较为广泛、较为成熟的CORS技术方法,分别是VRS技术、FKP技术和IMAC技术。
https://wenku.baidu.com/view/89e95282e53a580216fcfefd.html
11、VRS:Virtual Reference Station 虚拟参考站系统
它是由 Herbert Landau 博士提出,并由Spectra/Terrasat 公司推向市场的模型。它通过与流动站相邻的各个参考站之间的基线计箅估计各项误差,中心控制站根据三角形插值方法建立一个对应于流动站点位的虚拟参考站(VRS),将这个虚拟参考站的改正数信息传输给流动站,然后流动站结合自身的观测值实时解算出流动站的精确点位。服务区内每一个流动站对应着一个不同的 VRS参考站,所以,存在许许多多个VRS参考站。由于VRS参考站发送的是正常格式的RTCM信息,因而流动站并不需要知道参考站所用的参数模型。
因为参考站需要根据流动站点位建立相应的局部改正数模型,所以流动站必须通过NMEA格式把它的点位信息发送给中央控制站,这就足说流动站需耍配备类似GSM移动电话的双向数据通讯装置。
12、FKP:Flachen-Korrektur-Paxameter
GEO++公司Gerhard Wübbena博士提出的全网整体解算模型,这是一种动态模型:它要求所有参考站将每一个观测瞬间所采集的未经差分处理的同步观测值,实时地传输给中心控制站, 通过中心参考站的实时处理,产生一个称为FKP的空间误差改正参数,然后将这种FKP参数通过扩展的RTCM信息,发送给所有服务区内的流动站。系统传输的FKP参数能够比较理想地支持流动站的应用软件,但是流动站系统必须知道有关的数学模型,才能利用FKP参数生成相应的改正数。为了获取瞬时解算结果,每一个流动站需要借助于一个称为AdV盒的外部装置,配合流动站接收机的RTK作业。
13、MAX:(以及 iMAX) Master-Auxiliary Corrections
徕卡公司目前推荐采用的主辅站模式(MAX):原理上与普通GNSS作业时的参考站没有太大的区别。每一个参考站服务于一定作用半径内所有的GNSS用户。对于长时间静态跟踪数据后处理的用户,借助于接收调频副载波、宽带快速网络通信,以及其他数裾通信手段提供的DGPS伪距差分改正数信息,从事准实时定位或实时精密导航的用户来说,服务半径可以达到几十公里、几百公里,甚至更长一些。至于需要实时给出厘米级定位精度的用户来说,单参考站的服务半目前前可以达到30公M以上。
当前占主导地位的网络CORS技术是VRS和MAC,其他还有FKP 技术,FKP目前只有德国的SAPOS网络在使用,覆盖面较窄。VRS 和MAC在网络参数估计方法,改正数的生成,发布方法和流动站端计算量等方而各不相同。天宝CORS方案采用的VRS技术,徕卡是iMAX主辅站技术,国内GNSS厂家都没有成熟的此类技术。CORS系统核心是由一套中央控制器软件来展现,就是说表现在产品上就是一套软件。
14、ICD:Interface Control Document
卫星导航系统空间信号接口控制文件,也叫ICD文件,该文件规范了卫星导航系统和用户接收机之间的信号接口关系,是开发制造接收机及芯片所必备的技术文件
15、BIAS:偏差;
IFPB:Inter-Frequency Phase Bias 频率间相位偏差,GLONASS特有的性质;GLONASS观测中的频率间偏差会阻碍GLONASS双差(DD)解模糊度。
IFCB:Inter-Frequency Clock Bias 频率间钟差偏差,随着GNSS现代化进程的加快,观测信号已从单频、双频逐步向三频甚至多频发展。早期受实测数据的限制,大多有关三频信号组合定位或模糊度确定等的讨论一般均基于模拟观测(组合观测)值进行。随着相关GNSS系统建设的不断推进,实测的三频信号开始逐步用于定位并得到初步研究。对实测数据分析的结果表明,QZSS系统三频信号频间偏差相对稳定,而GPS、北斗甚至伽利略系统三频观测信号间都存在显著的偏差、不一致性,且这一偏差是随时间变化的。基于双差观测的相对定位中,三频信号频间偏差可以完全抵消。然而,在采用非差观测的精密单点定位PPP中,稳定的频间偏差会被非差模糊度参数所吸收,影响非差模糊度参数的特性。频间偏差随时间变化的部分则被卫星钟差所吸收,使得采用无电离层组合L1/L2(B1/B2)与 L1/L5(B1/B3)估计的卫星钟差具有不一致性。采用常规方法进行卫星钟差服务时,需要求解两套钟差产品,会增加成本和计算负担。为了消除钟差产品的不一致性并提高效率,需要对三频信号频间钟差偏差IFCB进行快速估计,并实现模型化。
DCB :Differential Code Bias 差分码偏差;全球卫星导航系统(GNSS)中,通过不同信号得到的观测值之间存在的系统性偏差。DCB是由卫星和接收机硬件延迟的影响造成的。一般来说接收机端的DCB可以跟接收机钟差一起解算,被接收机钟差所吸收;而卫星端的DCB在精密定位中必须得到补偿。DCB主要有两种,即相同频率不同码之间存在的偏差(如P1-C1、P2-C2等),以及不同频率之间存在的偏差(如P1-P2)。
https://blog.csdn.net/tyst08/article/details/103950331
16、RTCM协议:Radio Technical Commission for Maritime Services,国际标准GNSS差分信号格式;
另一个常用的差分格式是CMR,它是Trimble公司于1996年开始设计的一套用于RTK的差分格式标准,主要是针对RTCM格式的码发送率必须高于4800b/s这一不足之处而定制的,CMR的码发送率只有RTCM的一半,即2400b/s。
伴随着全球导航卫星系统(GNSS)的发展,其应用范围逐渐扩大,几乎涉及了国民经济的所有领域,包括与普通消费者相关的大众市场。不同于传统的测量测绘等行业市场应用,大众市场的应用往往伴随着更复杂的观测环境,如多路径干扰,频繁周跳等,其GNSS数据处理策略一定程度上也决定了位置、速度、时间以及大气延迟等信息的获取频率和精度。随着大众市场对高精度定位需求的增长,迫切要求低成本精密定位技术进行技术革新。现阶段,单独依赖GNSS设备本身的定位性能并不能满足厘米级高精度定位和完好性的需求,需要各类增强系统(服务)提升其性能。
增强系统的类型有很多,例如差分系统、局域增强系统、地基增强系统、广域增强系统、星基增强系统、传感器增强系统等。从技术角度,增强服务可以分为两大类即观测域(OSR)增强服务和状态空间域(SSR)增强服务,其中,差分系统、局域增强系统和地基增强系统属于观测域增强服务,广域增强系统和星基增强系统属于状态空间域增强服务,而传感器增强实质上是一种间接的OSR增强服务。
—— GNSS增强定位技术发展与星地融合应用:https://www.jianshu.com/p/1930189cd74c
17、OSR:Observation Space Representation 观测域增强服务
18、SSR:State Space Representation 状态空间域增强服务
广义上,SSR是相对于OSR,一个状态域,一个是观测值域,目标都是消除误差
狭义上,SSR指的是RTCM 10403.X中的电文类型,用于发布轨道,钟差,电离层,偏差信息的。
PPP是个算法,相比的是RTK,前者属于SSR改正,后者属于OSR改正。
属于SSR 的有很多算法,PPP,PPP-RTK等等,特征就是误差源分离,分别改正。
属于OSR的也有很多算法,DGNSS,RTK等等,特征就是差分,利用误差相关性消除误差影响
但是两者也有结合的地方,NRTK就是
小范围,DGNSS,RTK,NRTK占优,大范围PPP等占优
干净的OMC(Observed-Minus-Computed,观测值减计算值)观测量
问:RTD也可以认为采用OSR?
凡是解算算法接收的是参考观测值(载波,伪距),就属于OSR,RTD,RTK都是
凡是解算算法接收的是各种改正数(钟,轨道,等等),就属于SSR,PPP是典型


https://m.sciencenet.cn/blog-858128-1223868.html
上一篇:相位(phase)
下一篇:久违空间宣传画册