博文
机械的基本知识
||||
1.机器(动力机+传动装置+工作机);有确定的相对运动,能代替人的体力做有用的机械功或进行能量转换;机械=机器+机构;
2.传动装置的目的和作用:1)改变速度、扭矩和运动形式;2)分配动力和运动;
3.零件(加工制造的单元体)、构件(运动的单元体)、部件(为完成同一使命,在结构上联系在一起的一套协同工作组合,如减速器等)
4. 每个零件:工作原理及特点—>受力分析—>失效分析—>建立计算准则—>计算零件主要尺寸—>结构设计、画图;
5.基本要求:使用要求、经济性要求、安全性要求;特殊要求(多学科综合考虑);
6.失效:机械零件不能正常工作;工作能力:机械零件抵抗失效的能力;计算准则:判断机械零件是否足够工作能力的准则;
7.主要的失效形式(断裂失效、表面失效、过量弹性变形、强烈振动);
8.计算准则:强度计算准则、刚度计算准则、抗磨性计算准则、振动稳定性计算准则;
9.机械零件的载荷、应力和许用应力;
10.构件——运动的单元体;构件=原动件+从动件+机架(必须只有一个);
11.物体可能的独立运动数;没有任何约束的物体具有6个自由度;
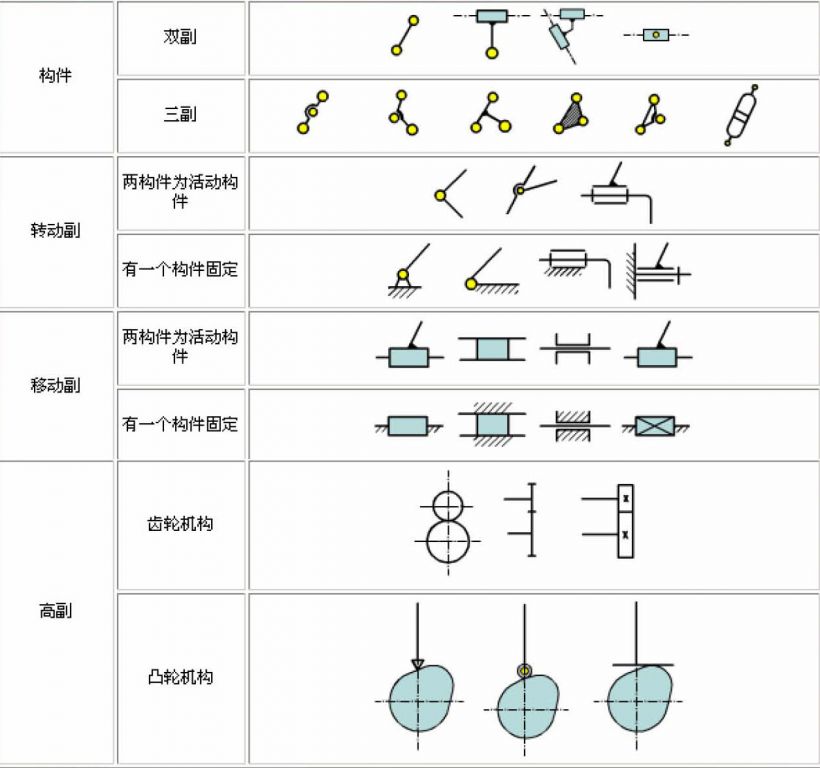
12.运动副:两构件直接接触,又能产生相对运动的连接;低副(面接触,转动副+移动副)+高副(点、线接触);
13.常见构件与运动副的表示方式[图1]。
14.平面机构自由度计算:F=3n-2PL-PH,n活动构件数,PL低副数,PH高副数;
15.机构具有确定运动条件:F>0;原动件个数应等于自由度数;注意事项(复合铰链、局部约束、虚约束);
16.复合铰链(由多个构件构成一个转动副);
https://m.sciencenet.cn/blog-87352-434541.html
上一篇:物流设施布置规划与Richard Muther
下一篇:什么是工业工程
扫一扫,分享此博文
全部作者的精选博文
全部作者的其他最新博文
全部精选博文导读
相关博文
- • 700年后日本或濒临灭绝?日本学者推算预测:届时或仅剩1名15岁以下孩子
- • [转载]【同位素视角】非英语母语学者如何区分’e.g.’, ‘i.e.’, ‘namely’与‘such as’等混淆难题
- • 美国佐治亚大学等机构学者:刈割策略对Bulldog 805紫花苜蓿+Tifton 85狗牙根混播草地产量及品质的影响
- • 美国堪萨斯州立大学、密苏里大学等机构学者研究成果:土壤水分管理策略和品种多样性对紫花苜蓿产量、营养品质和农场盈利能力的影
- • 德国、捷克草业科学学者长期放牧实验:异质草地斑块中的土壤有机碳储量和地下生物量
- • 如何才能连续被评为十年“中国高被引学者”?——对话上海大学王卿文教授