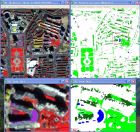
基于ENVI的面向坡向的地形校正方法实现 地形校正的目的 地形校正的目的主要是补偿由于不规则的地形起伏而造成的地物亮度的变化。由于这种变化会导致相似或同种植被的反射率不一致而影响遥感影像的分类精度,因此,精确的地形校正不仅能提高影像分类的精度,而且还是遥感应用的前提。 实验方法: 1、数据准备 试验中使用的影像数据是云南省的Landsat5 TM 影像, 影像获取时间为2006年01月25日, 影像中心位置位于东经99.59E,北纬28.36N,太阳高度角和方位角分别为36.15和146.46。文中选取了一块2014 pixels ×934 pixels的试验区域,该地区的地物类型主要是山林。 2、数据预处理 2.1 数据定标处 图2.1Landsat TM元数据以及DEM、NUM数据列表 如上图所示,landsat TM数据总共包含了7个波段的数据,其中6波段为热红外波段,其他6个波段为可见光波段。在软件中逐一打开7个波段,再进行波段组合给用户带来了很大的不便。利用envi主菜单 open image file L5131041_04120060125_MTL.txt打开文件,该文件数据可自动进行波段组合以及分类,显示结果如下图2.2: 图2.2 波段自动组合分类 波段数据读入以后进行数据的辐射定标处理,在envi下有一个专门针对Landsat数据的定标处理模块,具体的操作步骤如下: ENVI主菜单 Basic Tools Preprocessing Calibration Utilities Landsat Calibration。 图2.3 Landsat定标模块自动读取参数 2.2 数据裁剪 数据裁剪的方式有很多,在本次试验中主要采用数据的规则采用——ROI rectangle裁剪。打开影像数据,在其image窗口中点击:Overlay Region of Interest,弹出ROI TOOL对话框: 图2.4 ROI裁剪对话框 感兴趣区划好之后进行影像数据的裁剪:ENVI主菜单 Basic Tools Subset Data via ROIs。 对于DEM数据而言,该数据的投影方式以及空间分辨率可能会与上述影像数据有差,为了能将二者的数据进行很好的吻合,在进行ROI裁剪的时候需要对其ROI进行一个Map的转换,具体转换方式如下: 图2.5 ROI在不同影像间的地图转换 在此之后选择DEM数据,并对其进行裁剪,得到本实验所需要数据。 2.3 坡度、坡向数据获取 在进行地形校正的过程中,坡度、坡向对于其反应地表真实的影响很大。在获得DEM数据以后,通过ENVI主菜单下 Topographic Topographic Modeling进行坡度、坡向数据的提取。 图2.6 坡度、坡向提取 在地形校正过程中影响最大的坡向为南坡,需要通过BandMath工具进行南坡数据(157.5,202.5)的提取以及对应的坡度数据提取,为后面的地形校正提供数据。具体的实现方法、步骤如下: ENVI主菜单 Basic Tools Band Math (b1 ge 157.5 and b1 le 202.5)*b1+(b1 lt 157.5 and b1 gt 202.5)*0,Add to List ,点击OK,配置b1对应的波段数据Aspect文件,即可完成南坡信息提取。 图2.7 南坡信息提取条件 关于南坡影像信息对应的坡度影像,TM影像区域信息的提取方法依然采用Band Math进行提取,提取公式如上图2.7中的(b1 ne 0)*b2+(b1 eq 0)*0,其中b1代表南坡影像信息,b2代表TM影像以及坡度影像信息。重复操作两次即可提取相对于的南坡区域的TM影像以及坡度影像。 3、地形校正——坡度匹配技术 C校正模型的基本思想是:对于任意波段影像的像素DN值和其对应的太阳入射角余弦值都遵循线性关系。理想情况下,当太阳入射角为零或小于零时,表明该点缺乏太阳光照,则该点的DN值应该为零,该拟合直线应通过原点。然而,实际情况是,由于大气散射和地表相邻点反射光折射的缘故,使像素DN值和太阳入射角α成一定的余弦关系。本文采用的模型是在二阶校正模型的基础上改进建立的,需经过二个阶段(二次校正)才能得到校正结果。 按照公式(1)计算太阳有效入射角余弦值 cos i= cosz*cosS+sinz*sinS*cos(ψx-ψn) (1) 式中, z 为太阳天顶角(即,90-太阳高度角), ψx 为太阳方位角, S 为坡度, ψn 为坡向。 在ENVI主菜单 Basic Tools Band Math 中输入: cos((90-36.1530740)*0.01745)*cos(b2*0.01745)+sin((90-36.1530740) *0.01745)*sin(b2*0.01745)*cos((146.4600750-b4) *0.01745) 其中,b2 代表坡度;b4代表坡向。 第一阶段(第一次校正),按公式(2)进行。 L H = L T + ( L Tmax -L Tmin ) * (( -X ) / ) (2) 式中,LH为第一次校正结果,LT为原始影像,LTmax为原始影像最大值,LT民为原始影像最小值, 为拉伸为0-255的阳坡(南坡)太阳有效入射角余弦值的平均值,X为拉伸为0-255的太阳有效入射角余弦值。 在ENVI主菜单 Basic Tools Band Math 中输入: b1+(max(b1)-min(b1))*((mean(b2)-b3)/mean(b2)) 其中,b1 代表Landsat 5TM原始数据;b2代表拉伸为0-255的阳坡(南坡)太阳有效入射角余弦值的平均值;b3代表拉伸为0-255的太阳有效入射角余弦值。 第二阶段(第二次校正),根据公式(3)求算模型修正系数。 Cλ= ( S′λ-Nλ ) / ( N′λ-Nλ ) (3) 式中:Cλ为图像各波段的模型修正系数,S′λ为第一次校正结果阳坡(南坡)平均值,N′λ为第一次校正结果阴坡(北坡)平均值,Nλ为原始图像阴坡(北坡)平均值。 在ENVI主菜单 Basic Tools Band Math 中输入: (mean(b1)-mean(b2))/(mean(b3)-mean(b2)) 其中,b1 代表第一次校正结果阳坡(南坡)平均值;b2代表原始图像阴坡(北坡)平均值;b3代表第一次校正结果阴坡(北坡)平均值。 把计算出的各波段模型修正系数带入公式(2)建立公式(4)进行第二次校正。 L H = L T + ( L Tmax -L Tmin ) * (( -X ) / ) * Cλ (4) 在ENVI主菜单 Basic Tools Band Math 中输入: b1+(max(b1)-min(b1))*((225.43-b3)/225.43)* (mean(b4)-mean(b5))/(mean(b6)-mean(b5)) 其中,其中,b1 代表Landsat 5TM原始数据;b2代表拉伸为0-255的阳坡(南坡)太阳有效入射角余弦值的平均值;b3代表拉伸为0-255的太阳有效入射角余弦值。b4 代表第一次校正结果阳坡(南坡)平均值;b5代表原始图像阴坡(北坡)平均值,b6第一次校正结果阴坡(北坡)平均值。 4、结果展示 图 4.1 原始影像、第一次校正结果以及坡向校正结果对比图 图 4.2 原始影像、第一次校正结果以及坡向校正结果对比图 根据上述两幅图的对比可以看出,在经过坡向地形校正以后其校正影像显示结果很显著。需要注意的是:利用该种方法进行地形校正的时候一定要保证dem数据的准确性,不然在后面进行坡度坡向信息提取的时候容易出现与实际情况不符的状况,最终影像到纠正结果。 结果分析 采用该种方法很好的进行了地形校正,是不是最终的结果能将山体阴影下的植被给予很好的显示,需要对其校正前后获取的NDVI值进行对比分析,从而确定该种方法的精度。 图5.1 校正前后的NDVI值对比 图5.2 山体阴影处经过校正后的NDVI值的变化 上述两幅图是从山体阴影上分析校正前后NDVI值的变化情况,从这个DN值的变化上可以看出,经过校正后的影像获取的NDVI值更为接近实际地表的植被覆盖情况。对于裸露的地表,其NDVI值的变化是不是很大,下面从裸土着手分析,坡向地形校正对于不存在阴影的地区的校正结果如何。 图 5.3裸露地表NDVI值的变化 从上图5.3的结果对比分析可以看出,裸露地表的NDVI值的变化在0.03范围,变化不是很大,这与开始设想的坡向地形校正方法主要是针对山体阴影区域的校正,对于平坦区域的作用影像还是比较小的。 综合上述的结果对比分析以及影像显示效果分析得出,该方法能很好的帮助我们进行山体阴影区域的植被生长情况的恢复,为以后的研究工作提供了更为便捷的校正方法。 坡向工作原理制定 用于识别出从每个像元到其相邻像元方向上值的变化率最大的下坡方向。坡向可以被视为坡度方向。输出栅格中各像元的值可指示出各像元位置处表面的朝向的罗盘方向。将按照顺时针方向进行测量,角度范围介于 0(正北)到 360(仍是正北)之间,即完整的圆。不具有下坡方向的平坦区域将赋值为 -1。 坡向数据集中每个像元的值都可指示出该像元的坡度朝向。 从概念上讲, 坡向 工具将根据要处理的像元或中心像元周围一个 3 x 3 的像元邻域的 z 值拟合出一个平面。该平面的朝向就是要处理的像元的坡向。 下图显示的是输入高程数据集和输出坡向栅格。 1. 坡向算法 移动的 3 x 3 窗口会访问输入栅格中的每个像元,而每次位于窗口中心的像元的坡向值将通过一种将纳入八个相邻像元值的算法进行计算。这些像元使用字母 a 至 i 进行标识,其中 e 表示当前正在计算坡向的像元。 像元 e 在 x 方向上的变化率将通过以下算法进行计算: = (( c + 2 f + i ) - ( a + 2 d + g )) / 8 像元 e 在 y 方向上的变化率将通过以下算法进行计算: = (( g + 2 h + i ) - ( a + 2 b + c )) / 8 代入像元 e 在 x 方向和 y 方向上的变化率,坡向将通过以下算法进行计算: a spect = 57.29578 * atan2 ( , - ) 然后,坡向值将根据以下规则转换为罗盘方向值(0 到 360 度): 2. 坡向计算示例 示例中,将计算移动窗口内中心像元的坡向值。 中心像元 e 在 x 方向上的变化率为: =(( c + 2 f + i )-( a + 2 d + g ))/8=((85 + 170 + 84))-(101 + 202 + 101))/8=-8.125 像元 e 在 y 方向上的变化率为: = (( g + 2 h + i )-( a + 2 b + c ) / 8=((101 + 182 + 84)-(101 + 184 + 85))/ 8 = -0.375 坡向计算如下: a spect = 57.29578 * atan2 ( , - )= 57.29578 * atan2 (-0.375, 8.125) = -2.64 由于计算得出的值小于零,则根据最终规则得出: c ell = 90.0 - aspect = 90 - (-2.64)= 90 + 2.64 = 92.64 中心像元 e 的值 92.64 表明它的坡向为朝东。 3. 参考文献 Burrough, P. A., and McDonell, R. A., 1998. Principles of Geographical Information Systems (Oxford University Press, New York), 190 pp.
Center for Molecular Imaging and Translational Medicine, Xiamen University 为了适应海内外优秀人才快速向厦门特区聚集的新形势及借此加快建设世界高水平大学的进程,厦门大学正在投巨资筹建一个新型的采用国际通行科研体制管理的综合性研究机构——分子影像暨转化医学研究中心 (Center for Molecular Imaging and Translational Medicine, Xiamen University)。目标是在较短时间内将该中心建设成一个具有鲜明学科交叉特色、拥有世界一流研究水准的协同创新研发中心,同时为我国实现科研体制改革的国家战略目标提供试点和经验。中心已购置大型医用回旋加速器 (IBA Cyclone 18/9 HC)、多功能放射药物合成系统 (IBA Synthera)、小动物PET/CT (Siemens Inveon)、SPECT/CT (Mediso nanoScan SC)、小动物高场强MRI (Bruker 9.4T/200mm)、小动物多光谱光声断层扫描成像系统 (Endra Nexus 128)、生物发光小动物活体成像系统 (Caliper IVIS Lumina II)、荧光小动物活体成像系统 (Carestream FX Pro)等先进、完善的分子影像研究设备,开展立足分子影像学及转化医学前沿的基础及临床研究和满足国家战略需求的高技术研究。 中心采用和国际接轨的高效科研管理体制,使中心的所有科研人员都能够最大限度地发挥其创造力和主导作用。中心将给每个科研人员配备相应的实验室空间和科研平台建设费,鼓励其建立独立的研究小组,而方向接近的研究小组可以组成一个实验室。国际著名分子影像学专家陈小元博士(http://www.nibib.nih.gov/Research/Intramural/XChen)任中心学术委员会主任。中心将充分发挥国际知名科学家的领军作用、同时激励青年研究人员快速成长为杰青等国家级人才并具有一定国际影响力。 中心面向全球招聘多名科研组长、研究骨干和技术人员, 围绕肿瘤核素、光学、磁共振分子影像、多模态分子影像系统、纳米生物材料、干细胞治疗等研究方向开展高水平研发工作。中心鼓励并协助应聘人员申报中组部千人、青年千人、闽江学者、厦门市双百计划等各类拔尖人才计划。同时欢迎有志于做出一流科研成果的青年博士申请中心的博士后位置。申请人需具有独立科研工作能力和优秀的团队合作精神。应聘者请提供:个人简历、三位推荐人联系方式、3-5篇个人近期代表作、一份近期研究工作规划。请通过E-Mail发至 xiamen.cmitm@gmail.com 。中心学术委员会将对申请材料进行初选,初选合格者将受邀来我校参加评聘答辩,由我校支付往返旅费和食宿费用。 研究方向 招聘条件及要求 核医学成像 核素药物 从事 核素分子探针基础与临床研究;从事正电子药物的生产合成,以及回旋加速器与合成模块的保养与维护。 磁共振成像 从事磁共振分子影像研究,磁共振成像线圈、成像系列设计、图像处理及数据分析。具有小动物肿瘤成像及 19 F磁共振成像研究经历者优先。 光学成像 从事光学 系统设计、光纤应用技术、光电 仪器 与系统、智能化 传感 器、信号检测及重建成像处理等研究。 超声/光声成像 从事超声成像、光声成像、光学相干断层成像及图像处理分析研究。具有 超声微泡 造影剂、光声造影剂研发经历优先。 纳米医学 从事纳米生物材料的生物成像、药物传输和治疗研究;纳米材料的生物学效应与生物安全性评价研究;纳米微型检测系统研发。 图像处理与分析 计算机、软件、光学、通信等相关专业,熟悉图像处理与分析。 分子、细胞生物学 责任心强,具有扎实的理论基础及综合能力;熟练基因转染、细胞培养及动物手术及肿瘤模型等相关理论知识和操作技术,具有干细胞研究经历者优先。 Xiamen University (Fujian, China) aims to recruit an outstanding team of qualified faculty candidates to establish a state-of-the-art molecular imaging center program, which includes cyclotron, PET/CT, SPECT/CT, MRI, bioluminescence and fluorescence, intravital microscope, ultrasound and photoacoustic imaging capabilities. Interested individuals with background in molecular imaging, radiochemistry, biomaterials, nanomedicine, molecular biology, instrumentation, computation, data processing and/or translational medicine are welcome to send in your CV and inquiries to xiamen.cmitm@gmail.com. Application materials should include: 1) a curriculum vitae; 2) a 5-year research plan; 3) three references with detailed contact information; 4) 3-5 representative publications. 厦门大学机电工程系诚聘高端人才启事 厦门大学化学化工学院杨朝勇教授课题组招聘 厦门大学公共卫生学院诚聘各型学术人才公告 厦门大学建筑与土木工程学院诚聘海内外英才
今天,喷气推进实验室JPL的网站正在快速发布卡西尼探测器昨天和前天拍摄的土卫二的图片.土卫二(Enceladus)已被探测到有冰火山的存在,被认为在冰层下,有大量的液态水,因而有一定可能存在微生物.更多信息请访问: http://saturn.jpl.nasa.gov 由于没有时间写更多的文字材料,请大家参阅图片为主,所有图片均为未校准过的RAW IMAGE.土卫二表面比较年轻,有大量的沟壑,希望有兴趣的地质研究者尝试进行影像解译.国内学者在尝试利用行星际无人探测器研究太阳系天体地质方面已经有先例,如韩同林等人《火星地貌与地质》一书就是很好的作品。 图1,图片说明: W00060951.jpg was taken on November 02, 2009 and received on Earth November 02, 2009. The camera was pointing toward ENCELADUS at approximately 9,988 kilometers away, and the image was taken using the CL1 and CL2 filters. This image has not been validated or calibrated. A validated/calibrated image will be archived with the NASA Planetary Data System in 2010. 图2:图片说明: N00145324.jpg was taken on November 02, 2009 and received on Earth November 02, 2009. The camera was pointing toward ENCELADUS at approximately 14,188 kilometers away, and the image was taken using the CL1 and IR3 filters. This image has not been validated or calibrated. A validated/calibrated image will be archived with the NASA Planetary Data System in 2010. 图3 图片说明: N00145323.jpg was taken on November 02, 2009 and received on Earth November 02, 2009. The camera was pointing toward ENCELADUS at approximately 13,721 kilometers away, and the image was taken using the CL1 and GRN filters. This image has not been validated or calibrated. A validated/calibrated image will be archived with the NASA Planetary Data System in 2010. 图4:图片说明: N00145322.jpg was taken on November 02, 2009 and received on Earth November 02, 2009. The camera was pointing toward ENCELADUS at approximately 9,988 kilometers away, and the image was taken using the CL1 and CL2 filters. This image has not been validated or calibrated. A validated/calibrated image will be archived with the NASA Planetary Data System in 2010. 图5:图片说明: N00145329.jpg was taken on November 01, 2009 and received on Earth November 02, 2009. The camera was pointing toward ENCELADUS at approximately 330,844 kilometers away, and the image was taken using the CL1 and CL2 filters. This image has not been validated or calibrated. A validated/calibrated image will be archived with the NASA Planetary Data System in 2010. 著作权声明: 在本篇博文中,除了特别注明的以外,所有图片的署名标注均为:Courtesy NASA/JPL-Caltech, 在JPL/NASA图片许可条件( http://www.jpl.nasa.gov/imagepolicy/ )下使用.
 标签: 影像
标签: 影像


![[转载]地质地貌卫星影像集锦(矿产资源篇)](http://image.sciencenet.cn/album/201107/09/114318oa1918oo10x19s0d.jpg.thumb.jpg)
