

自动化所平行测试系统助力中国智能车未来挑战赛,获国际学界高度评价
【摘要】中科院自动化所平行智能技术与系统团队及其孵化公司慧拓智能研发的平行测试系统助力中国智能车未来挑战赛项目,通过虚实交互进行自动驾驶车辆测试、感知和控制,被国际期刊《智能交通系统杂志,ITSM》主编认为“奠定了未来智能交通产品和服务的基础”、“清晰地阐明了朝着道路安全、社会与环境可持续发展即将产生质变的方向”。

近日,自动化所王飞跃研究员团队、西安交通大学郑南宁院士团队和清华大学李力副教授等人联合提出的自主可升级的无人驾驶“平行测试”框架与系列方法获得智能交通领 域国际顶级期刊之一的《智能交通系统杂志(Intelligent Transportation Systems Magazine,ITSM)》封面文章报道。该方法可有效应对智能车辆路测安全问题,长期为“中国智能车未来挑战赛”提供实时、准确、高效、可靠、可信的车辆智能测试技术。此前曾作为“焦点文章”发表在Science子刊《科学·机器人(Science Robotics)》。
文章以“China 12-Year Quest of Autonomous Vehicular Intelligence The Intelligent Vehicles Future Challenge Program”为题,对中国智能车未来挑战赛项目背景、历年开展情况以及当下进展进行了详细介绍,展现了自动驾驶测试多个方面的突破与创新:
数据在线计算与评估——从离线分析到实时在线计算,针对自动驾驶测试中生成的大量数据进行分析与评估,提高数据利用率。
数字化实时测评——从繁琐、耗时、易出错的人工事后打分到数字化实时测评,保证了自动驾驶测试的高准确率与测试效率。
模拟测试新任务环境——在实地测试前模拟评估测试环境,通过平行视觉技术快速生成最大限度真实的模拟视觉数据。
......
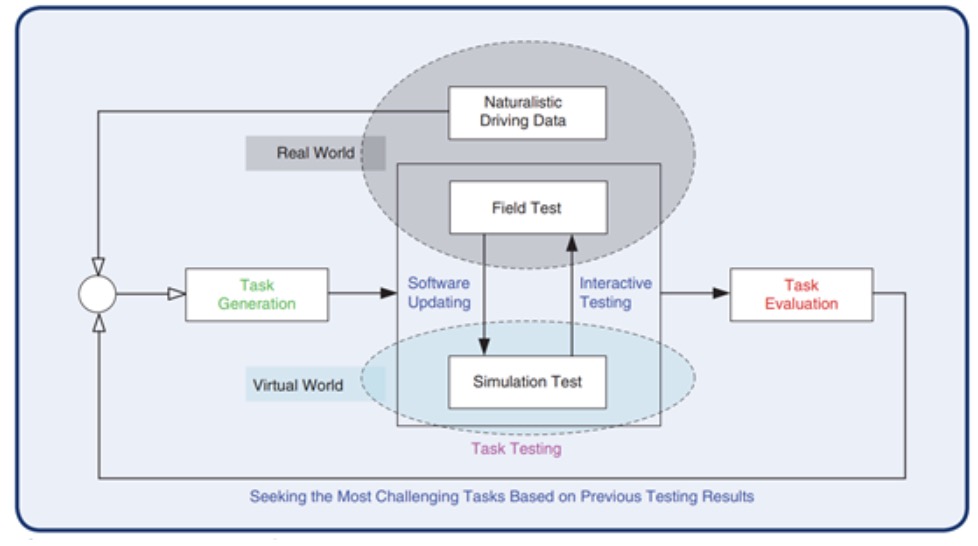
平行测试:基于过去的测试结果寻求最具挑战性的新任务
该篇文章得到了ITSM主编澳大利亚格里菲斯大学教授Ljubo Vlacic的关注与高度评价。他对“通过虚实交互进行自动驾驶车辆测试、感知和控制的平行测试、平行视觉和平行驾驶突破性的框架和方法”印象深刻;并认为“这些成就”是“奠定未来智能交通产品和服务的基础”、“清晰地阐明了朝着道路安全、社会与环境可持续发展即将产生质变的方向”。
“中国智能车未来挑战赛”是国家自然科学基金委员会于2009年创办的我国首个无人驾驶智能车比赛,已连续举办12年,是推动自动驾驶技术走向社会、推动产业发展的国家项目。中科院自动化所从“中国智能车未来挑战赛”创办之初即参与了一系列发起和前期研究工作,为赛事提供专业支撑。
相关研究得到了国家自然科学基金委信息学部的支持与指导,是国家自然科学基金委以重大计划引领中国智能汽车产业升级和良性发展的验证。
团队介绍
王飞跃研究员及其团队长期耕耘于复杂系统与智能控制领域,于2005年提出的“平行驾驶”这一原始创新概念,通过构建与现实行驶车辆与驾驶员平行的虚拟车和虚拟驾驶员,既能可视化展示真实车的本体知识、历史情况和实时信息,提供未来状态和情境的预测、回溯事故原因的计算功能,还可以虚实互动,提供监视、控制、管理、服务真实车的各类功能。
团队基于平行驾驶理论技术体系孵化了我国矿山无人化赛道的领军企业——慧拓智能,并与Intel和驭势科技建立了良好的合作关系。目前,中科院自动化所与慧拓智能共同创建的“智能交通与平行驾驶联合研发中心”即将投入运营。双方将进一步发挥研学产联合创新优势,围绕面向国家重大需求和产业应用需求,创新人才培养、学科建设、任务攻关和产业培育的新机制、新模式。
转载本文请联系原作者获取授权,同时请注明本文来自王飞跃科学网博客。
链接地址:https://m.sciencenet.cn/blog-2374-1291681.html?mobile=1
收藏