博文
串联弹性驱动器设计、建模及在机器人上的应用
|
引用本文
孙宁, 程龙. 串联弹性驱动器设计、建模及在机器人上的应用. 自动化学报, 2021, 47(7): 1467−1483 doi: 10.16383/j.aas.c200202
Sun Ning, Cheng Long. Design and modeling of series elastic actuators with applications in robot. Acta Automatica Sinica, 2021, 47(7): 1467−1483 doi: 10.16383/j.aas.c200202
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c200202
关键词
串联弹性驱动器,弹性,阻尼,机械实现方式,建模方法
摘要
相比于传统的刚性驱动器, 串联弹性驱动器(Series elastic actuator, SEA)具有被动柔顺性、阻抗低、抗冲击、力感知等诸多优点, 因而已被广泛应用于各种机器人系统中. 首先根据弹性和阻尼特性将串联弹性驱动器分为弹性型、阻尼型和弹性−阻尼型串联弹性驱动器, 介绍不同类型串联弹性驱动器的优缺点, 并详细概述弹性和阻尼特性的机械实现方式; 然后对各类串联弹性驱动器作为力传感器的建模方法进行介绍; 接着叙述串联弹性驱动器在机器人系统中的主要应用, 如力传感器、安全保护、降低能耗; 最后展望串联弹性驱动器未来的发展方向.
文章导读
驱动装置作为机器人系统运动和驱动力的输入单元, 其性能优劣对机器人系统的整体性能具有很大影响. 传统机器人多采用刚性驱动器, 能够精确地传递运动, 而人或其他动物的驱动装置是肌肉组织, 具有柔顺性, 导致人或其他动物在运动、安全与能源效率等方面远远超过传统机器人系统. 因此, 刚性驱动器已经阻碍高性能机器人的发展. 为解决该问题, 研究人员提出一种模拟生物肌肉的柔顺性驱动器—串联弹性驱动器(Series elastic actuator, SEA), 其主要是在驱动装置与末端执行器之间增加具有弹性和阻尼特性的装置, 解除驱动装置和末端执行器之间的耦合关系, 同时使SEA输出力与其形变量、相对速度成一定关系. 与传统的刚性驱动器相比, SEA具有被动柔顺性、阻抗低、抗冲击、力感知等优点[1], 已被广泛地应用于各种场合.
1995年Pratt等首次提出SEA, 其由驱动装置、减速装置、弹性元件、末端执行器以及位置传感器串联而成, 具有弹性特性, 应用于腿足式机器人中, 以实现力控制[2]. 在此基础上, 研究人员依据应用场景需求对其弹性和阻尼特性进行研究, 进而分别提出串联阻尼驱动器[3]和串联粘弹性驱动器[4]. 本文将以上三种结构相似的驱动器都视为SEA. 同时, 因为电机(包含减速装置)具有体积小、易于控制等特点, 通常将其作为SEA的驱动装置. 因此, 本文仅介绍以电机作为驱动装置的SEA.
到目前为止, 研究人员已经将各种SEA广泛地应用于外骨骼机器人[5-10]、腿足式机器人[11-17]、假肢机器人[18-22]、仿人型机器人[23-27]等领域. 为适应不同的应用需求, 发展出了各种特定的SEA, 这些方案都是依赖于应用场景的具体解决方案, 没有能够满足不同应用场景需求的最好设计. 因此, 对SEA的现有机械设计技术、建模方法以及在机器人系统上的应用进行概述, 帮助设计者充分理解SEA的特点, 为得到合适的机械设计、精确的力感知能力和稳定的控制提供指导是有必要的.
为解决该问题, Lee等依据弹性元件相对于减速器和末端执行器的安装位置, 对SEA进行分类介绍, 并对各类SEA的动力学模型进行描述[28], 为SEA的机构设计和控制提供指导. Vanderborght等依据可变弹性和可变阻尼的实现方式, 对变阻抗弹性驱动器(SEA的上层概念)进行分类介绍, 以指导变刚度驱动器的机构设计, 但没有针对SEA进行详细描述[29]. 魏敦文等对仿生灵感下的弹性驱动器(SEA的上层概念)的结构组成、功能特性和应用等方面的研究现状进行阐述, 但是未对SEA的机械实现方式和作为力传感器的建模方法进行详细介绍[30]. 综上所述, 现有文献未对SEA电机与末端执行器之间的机械实现方式进行介绍, 并且未概述其作为力传感器的建模方法. 因此, 依据驱动器与末端执行器之间的弹性和阻尼特性, 本文对SEA进行分类, 并详细描述弹性和阻尼特性的机械实现方式, 对其作为力传感器的建模方法进行介绍, 以及描述其在机器人系统上的应用, 从而帮助设计人员提出适合应用场景的SEA设计方案.
文章首先介绍SEA的发展背景, 然后分4部分对SEA进行介绍. 第1部分, 依据SEA的弹性和阻尼特性将其划分为弹性型串联弹性驱动器(Elastic series elastic actuator, ESEA)、阻尼型串联弹性驱动器(Damped series elastic actuator, DSEA)以及弹性-阻尼型串联弹性驱动器(Elastic-damped series elastic actuator, E-DSEA), 介绍各种SEA的优缺点, 并详细描述驱动器与末端执行器之间的弹性和阻尼特性的机械实现方式. 第2部分对不同种类的SEA作为力传感器的建模方法进行介绍. 第3部分叙述SEA在机器人系统中的主要应用, 如力传感器、安全保护、降低能耗. 第4部分展望SEA的未来发展方向.
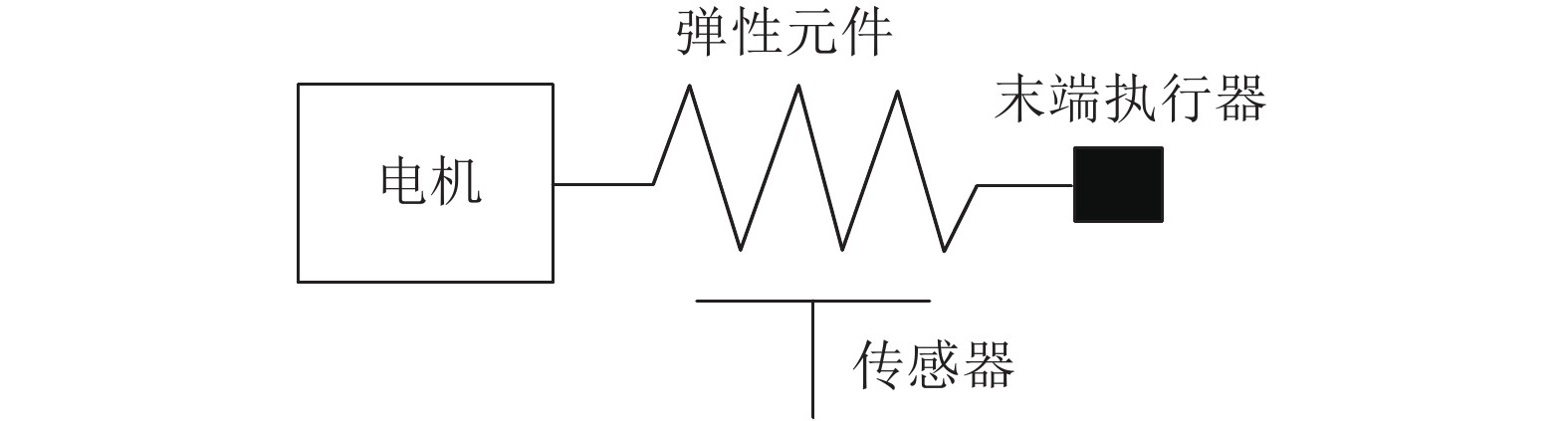
图 1 弹性型串联弹性驱动器的示意简图

图 4 基于螺旋扭转弹簧的弹性装置
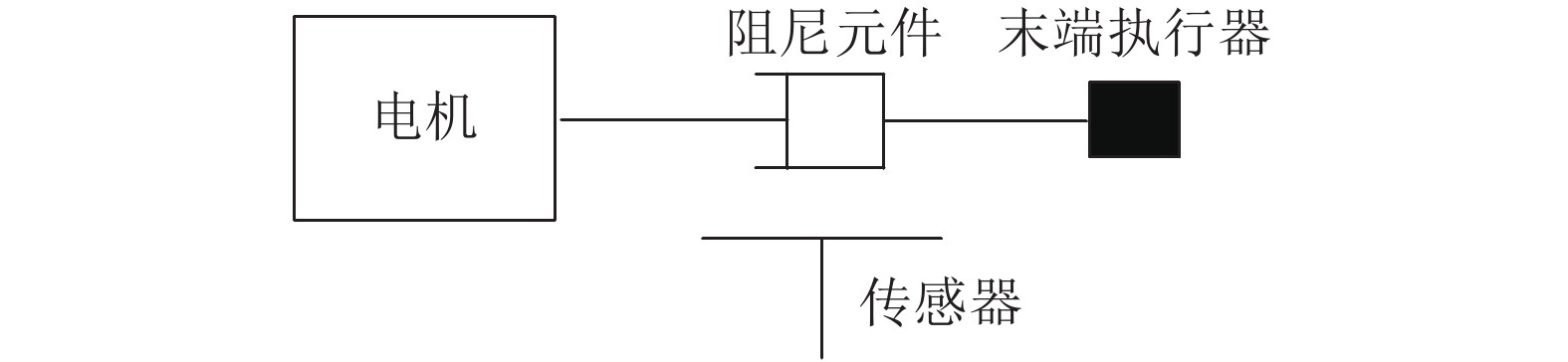
图 6 阻尼型串联弹性驱动器示意简图
本文首先依据弹性和阻尼特性把SEA划分为三种类型, 介绍各类SEA在避免系统震荡、零运动力带宽等方面的优缺点, 详细概述各类SEA的弹性和阻尼特性的机械实现方式. 除了DSEA发展较慢外, 其他两种SEA的机械实现方式都得到充分发展. 然后依据各类SEA表现的物理特性以及机械实现方式不同, 对SEA作为力传感器的一般建模方法及其典型案例进行叙述, 以辅助设计者对SEA进行建模. 最后本文介绍了SEA在机器人系统中作为力传感器、安全保护以及降低能耗等方面的应用, 并讨论了SEA在小型化、轻量化、力感知模型以及参数选择等方面所需要进一步开展的研究内容.
作者简介
孙宁
中国科学院自动化研究所博士研究生. 主要研究方向为手部康复外骨骼机器人, 柔性驱动技术. E-mail: sunning2018@ia.ac.cn
程龙
博士, 中国科学院自动化研究所复杂系统管理与控制国家重点实验室研究员. 主要研究方向为机器人, 智能控制. 本文通信作者. E-mail: long.cheng@ia.ac.cn
https://m.sciencenet.cn/blog-3291369-1351288.html
上一篇:直播回放‖自动化前沿热点讲堂之第十六讲
下一篇:SEAs导纳控制的μ综合方法