博文
智能网联车路云协同系统架构与关键技术研究综述
|
引用本文
丁飞, 张楠, 李升波, 边有钢, 童恩, 李克强. 智能网联车路云协同系统架构与关键技术研究综述. 自动化学报, 2022, 48(12): 2863−2885 doi: 10.16383/j.aas.c211108
Ding Fei, Zhang Nan, Li Sheng-Bo, Bian You-Gang, Tong En, Li Ke-Qiang. A survey of architecture and key technologies of intelligent connected vehicle-road-cloud cooperation system. Acta Automatica Sinica, 2022, 48(12): 2863−2885 doi: 10.16383/j.aas.c211108
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c211108
关键词
车路云协同系统,蜂窝车联网,智能网联汽车,边缘计算网络,高精度定位
摘要
随着汽车产业电动化、智能化、网联化、共享化的发展驱动, 全球主要强国均将智能网联汽车列为国家发展方向. 蜂窝车联网、边缘计算网络和高精度定位系统的技术发展, 为车车、车路、车人和车云系统的全面融合提供了有效支撑. 车辆、道路、云平台与蜂窝车联网(Cellular vehicle-to-everything, C-V2X)网络的融合, 加速打通车内与车外、路面与路侧、云上与云间的信息互通, 为实现车路云一体化的融合感知、群体决策及协同控制提供了重要基础. 首先, 梳理了智能网联车路云协同系统架构与关键技术, 对该领域的演进特征、发展制约因素进行了总体概述; 其次, 阐述了新型车路云协同系统、智能网联C-V2X通信系统、云控系统和车路云协同测试系统的架构设计与工作原理; 然后, 从C-V2X组网、融合定位、测试评价角度, 介绍了车路云协同系统融合V2X网络、融合定位的技术演进与研究进展, 给出了智能网联场景的仿真平台、实车测试及评价指标; 最后, 对智能网联车路云协同系统的协同组网与控制、互操作、边缘智能服务和安全技术层面的发展趋势进行了展望.
文章导读
汽车工业的快速进步, 信息传输、软件和信息技术服务业的快速发展, 推动了智能网联汽车(Intelligent connected vehicle, ICV) 产业的迅猛发展[1]. 美国、欧盟和日本等很早就开始布局基于专用短程通信技术(Dedicated short range communication, DSRC)标准的车路协同系统建设, 如美国先进交通和高速公路合作伙伴项目[2]、车辆基础设施集成项目[3], 欧盟的欧洲区域项目[4]、C-Roads项目[5]、日本的Smartway项目[6]等, 其中, 车−车和车−路协同是该类项目发展的重点. 国内对智能网联汽车和车路协同的研究起步相对较晚, 但国家主导了基于公众移动网络的蜂窝车联网(Cellular Vehicle-to-everything, C-V2X)技术标准, 相比DSRC, 该技术在网络架构、技术性能、技术掌控度及后续演进等方面具有优势. 作为5G和汽车领域最具潜力的应用之一, 智能网联汽车产业创新与车路协同系统建设在中国已上升到科技高度. 根据《新能源汽车产业发展规划(2021 ~ 2035年)》, 中国将重点推动智能化道路的升级改造, 加快新型基础设施建设, 鼓励引导车载无线通信终端的装配, 推动数字系统改造和云上平台, 打造智能网联核心竞争力与新型产业生态[7].
传统车路协同系统主要强调车与路侧设备之间的协同, 可以提供车与车、车与路之间的信息交互辅助单车决策和有限车载信息服务, 应用场景与服务能力均受限. 文献[7]首先提出车路云一体化融合控制系统的发展思路, 通过人、车、路、云等多维要素之间的融合感知、群体决策与协同控制, 从而提升道路交通系统的安全性、效率和绿色化等综合性能. 伴随着C-V2X技术创新, 边缘计算网络(Edge computing network, ECN)和高精度定位系统(Hi-gh precision positioning system, HPPS)等的发展与演进[8], 为构建智能网联车路云协同系统(Intelligent connected Vehicle-road-cloud cooperative sy-stem, IC-VRCCS)提供了核心驱动力, 主要表现在: 1)在智能网联车路云协同系统的智能化、网联化方面, 传统车路协同系统与C-V2X进行融合, 支持直连通信的PC5接口可以拓展各类“人−车−路−云”服务场景, 长期演进(Long term evolution, LTE)/5G Uu接口可以打通人−车−路−云多模式交互接口, 为智能网联车路云协同系统的建设提供决定性支撑[9]; 加快发展并集成多系统组合的HPPS, 不仅可以顺利实施自动驾驶和编队控制等服务, 并且能保障智能车辆在全球定位系统(Global positioning system, GPS)信号弱或无信号等环境下的全路况连续可用[10]; 2)在智能网联车路云协同系统测试方面, 各类仿真平台的综合运用, 全国测试场、示范道路和示范区的大力发展, 为各子系统与互操作测试、场景定义与场景生成及实车测试评价创造了有利条件[7]; 3)平台的互融协同方面, 由于智能网联自动驾驶系统具有低时延、大并发和高移动性的特点, ECN推动了网联系统的云平台架构演进, 基础平台与应用平台的分离, 将资源与业务进行解耦, 可实现虚拟云资源的高效利用与业务数据的高效传输以及业务云的统一建设、管理与开放[11-12].
智能时代的汽车控制发展进程是对驾驶员的环境认知感知、决策规划和执行控制等环节的逐步增强和最终替代[13]. 智能网联车路云协同系统中人−车−路−云与C-V2X网络的全面融合, 将会催生车−车(Vehicle-to-vehicle, V2V)、车−路(Vehicle-to-infrastructure, V2I)、车−人(Vehicle-to-pedestrian, V2P)和车−云(Vehicle-to-cloud, V2C)等各类新型业务模式的发展并综合运用, 但工程实现仍面临着一系列的挑战: 1)受限于智能车辆的整车设计与产业协同的工作阶段, 如何有效利用现有车辆平台并与C-V2X网络进行架构设计以及HPPS进行结合, 实现工作框架设计并给出设计要求, 是亟须解决的问题; 2)更多关联平台与系统的打通以及ECN的加入, 如何开展应用平台与基础平台的架构设计以及移动边缘计算(Mobile edge computing, MEC)与C-V2X的融合网络部署, 还有待进一步梳理并细化; 3)智能网联车路云协同场景相关设备和场地布设成本较高, 业界对各子系统与互操作以及场景测试研究正在积极展开, 但相关测试方案并未获得全面统一, 需要考虑高效地开展场景测试并推进理论到实际的转化. 为了更好梳理国内外智能网联车路云协同系统架构及其关键技术的发展现状, 本文将从智能网联车路云协同系统的架构技术, 智能网联V2X组网、融合定位和测试评价技术等关键技术方面进行详细阐述, 并对智能网联车路云协同系统的发展趋势展开讨论.
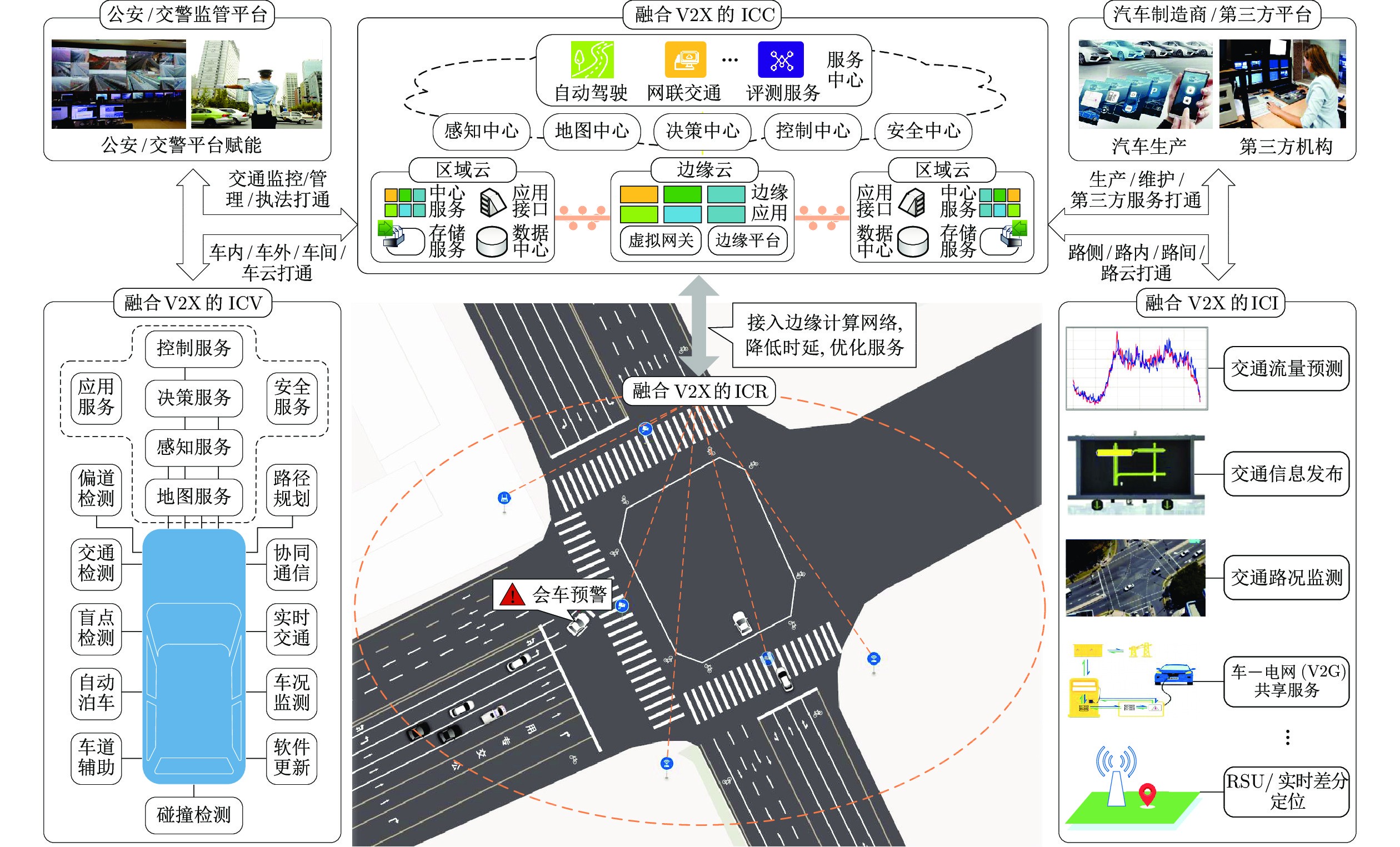
图 1 智能网联车路云协同系统逻辑框架
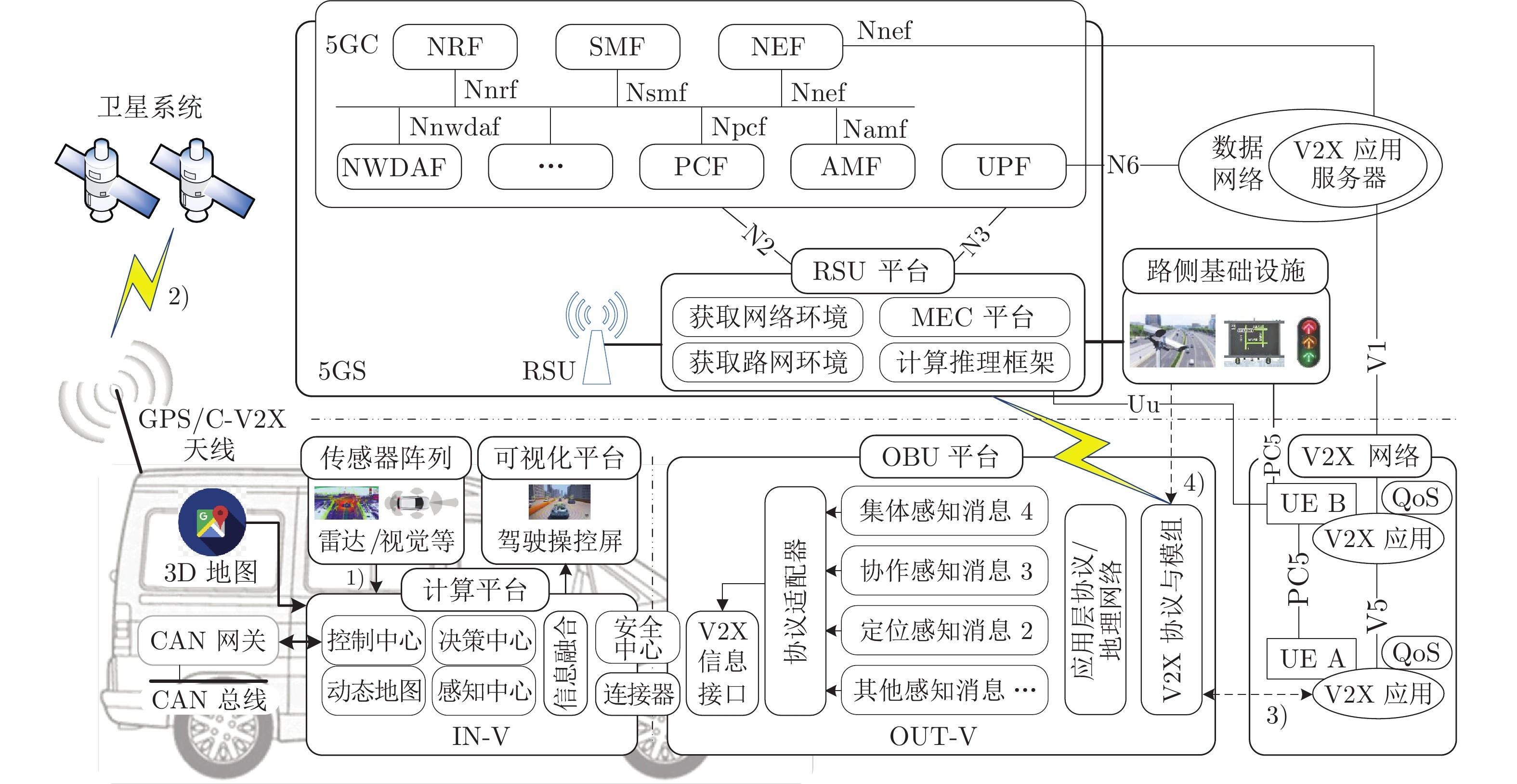
图 2 智能网联车辆V2X应用示意架构

图 3 面向车路云一体化融合的云控系统架构
B5G/6G、新能源和人工智能的发展, 引发了全球汽车产业格局与产业生态的重新构建, 为汽车产业变革与升级带来战略机遇. 面向智能网联车路云协同系统的发展现状与加速产业化需要, 本文介绍了新型车路云融合系统、智能网联V2X通信系统、云控系统和车路云协同测试系统等的总体架构设计. 当前全国智能网联车路云协同试验场正在全面建设的背景下, 从智能网联V2X组网、融合定位和测试评价三个关键技术方面进行了分析, 重点在协同组网与控制、互操作、差异化服务和安全等相关技术进行了现状分析与前沿展望, 旨在加速推进智能网联车路云协同系统从理论研究到实际应用的转换, 为实现未来人−车−路−云一体化协同作业下自动驾驶和下一代智慧交通系统的创新与变革提供技术参考与发展思路.
作者简介
丁飞
南京邮电大学物联网学院副教授. 2010年获东南大学博士学位. 主要研究方向为智能网联汽车通信与网络技术, 边缘智能与协同计算技术. 本文通信作者. E-mail: dingfei@njupt.edu.cn
张楠
南京邮电大学物联网学院硕士研究生. 主要研究方向为C-V2X技术和边缘智能技术. E-mail: zhangnan4899@163.com
李升波
清华大学车辆与运载学院教授. 2009年获清华大学博士学位. 主要研究方向为自动驾驶与智能汽车, 强化学习与最优控制, 群体智能与分布式控制, 驾驶状态监控与驾驶辅助. E-mail: lishbo@tsinghua.edu.cn
边有钢
湖南大学机械与运载工程学院副教授. 2019年获清华大学博士学位. 主要研究方向为协同控制, 智能控制及其在智能网联车辆的应用. E-mail: byg10@foxmail.com
童恩
中国移动−南京邮电大学5G联合创新中心教授级高工. 主要研究方向为智能网联汽车通信与网络技术, 智能通信与信息系统. E-mail: tonge@js.chinamobile.com
李克强
中国工程院院士, 清华大学车辆与运载学院教授, 国家智能网联汽车创新中心首席科学家. 1995年获重庆大学博士学位. 主要研究方向为智能网联汽车, 汽车系统动力, 汽车电子与智能控制. E-mail: likq@tsinghua.edu.cn
https://m.sciencenet.cn/blog-3291369-1370095.html
上一篇:JAS和自动化学报3篇论文入选中国百篇最具影响国际/国内论文
下一篇:人脸亲子关系验证研究综述