博文
利用灰度体元模型的机载LiDAR 3D道路提取
|
引用本文
王丽英, 段孟柳. 利用灰度体元模型的机载LiDAR 3D道路提取. 自动化学报, 2020, 46(11): 2439-2447 doi: 10.16383/j.aas.c180527
Wang Li-Ying, Duan Meng-Liu. Grayscale voxel model based airborne LiDAR 3D road extraction. Acta Automatica Sinica, 2020, 46(11): 2439-2447 doi: 10.16383/j.aas.c180527
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180527
关键词
激光雷达,道路提取,灰度体元模型,强度,三维
摘要
面向机载LiDAR数据的道路提取算法的常用数据结构存在局限: 2D格网及TIN表达多次回波数据时存在的信息损失会影响提取结果的完整性且提取结果为2D形式; 点云的空间结构及拓扑信息难以利用, 由此导致算法设计的困难.为此, 提出了一种基于灰度体元模型的3D道路提取算法.算法首先将LiDAR数据规则化为灰度体元模型(灰度为体元内LiDAR点的平均强度值的量化表示); 然后选取道路种子体元进而搜寻并标记种子及其3D连通区域为道路体元; 最后利用数学形态学优化提取结果.基于ISPRS提供的包含不同复杂程度的城区路网LiDAR数据测试"邻域尺度"和"灰度差阈值"参数的敏感性及提出的算法的精度.实验结果表明: 56邻域为最佳邻域尺度、2为最佳灰度差阈值; 道路提取的平均质量、完整度及正确率分别为70%、86.77%及81.13%;对相对平坦的单层路网及起伏较大的复杂路网均可成功提取.
文章导读
道路是关系国民经济的重要基础设施, 道路信息的及时、准确获取与更新对交通管理、自动车辆导航及应急事务处理均具有重要意义.多回波激光雷达(Light detection and ranging, LiDAR)可以快速获取地表高精度的3D点云数据及回波、强度等辅助信息, 该技术的出现使得道路3D信息的快速提取成为可能.
已有经典的面向LiDAR数据的道路提取方法中主要采用的数据结构有2D格网[1-10]、不规则三角网[11-12]和点云[13-26].其中, 前两者的同一平面坐标只能对应一个高程值, 用其表达3D LiDAR数据存在的信息损失会影响提取结果的完整性且其提取结果为2D形式, 难以直接构建3D道路网、反映道路的空间结构; 点云是LiDAR数据的原始表达, 可完全保留原始的3D信息, 但其并未明晰表达内部各LiDAR点的邻接信息, 由此造成了算法设计的困难.为了克服上述限制, 本文提出了一种基于灰度体元模型(Grayscale voxel model, GVM)的3D道路提取算法.
GVM是将离散、非规则分布的空间点集表示为以体元为基本单元的规则空间数据结构, 并依据体元内LiDAR点的平均强度的离散化程度对体元赋值.其优势在于: 3D数据结构更有利于综合利用多次回波信息、易于移植2D图像处理算法或在此基础上开发新算法; 各体元间隐含有几何拓扑关系, 易于操作和处理; 同时融合了LiDAR数据的高程和强度信息, 可用于高程或强度信息不同的目标分类.本文提出的算法即很好地利用了上述优势, 基于道路"空间结构上具有连通性、反射强度上表现出一致性"的特性、利用3D连通区域构建的理论构建道路提取模型.算法设计简单且道路提取结果—3D道路体可直接用作灰度3D道路模型, 相较于传统的道路提取算法具有明显优势.

图 1 GVM构建流程图
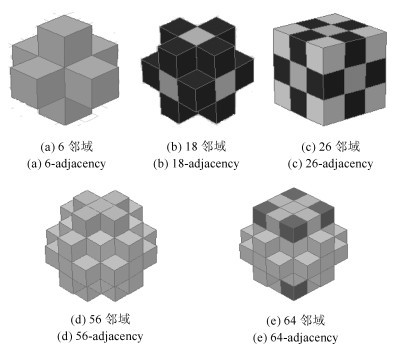
图 2 邻域尺度

图 3 实验数据
本文针对机载LiDAR数据灰度体元模型构建及在此基础上的3D道路提取展开研究, 提出了一种基于体元的道路提取算法.该算法以3D连通区域构建理论为基础, 将LiDAR数据中的目标提取从点云聚类等传统方式转换成基于体元的空间邻域关系的搜索标记方式, 综合利用了GVM内部隐含的几何、拓扑关系及灰度信息, 算法设计简单.定量评价算法精度实验的结果表明:无论是复杂、简单的道路网, 算法提取的道路完整率、正确率均可达80 %以上, 总体质量可达70 %以上.算法的不足之处在于:需要人工交互选择道路种子, 自动化程度有待进一步提高; 算法仅利用了机载LiDAR数据的几何和强度信息, 由此可能导致的停车场等与道路邻接、高程且反射强度均接近的地物的错误提取.后续研究可尝试基于多值体元模型(以多光谱LiDAR数据为数据源, 体元赋值其内的LiDAR点的色彩信息)的3D道路提取研究, 以提高复杂场景下道路目标提取的准确性.
作者简介
段孟柳
中铁二十四局集团新余工程有限公司助理工程师. 2017年获得辽宁工程技术大学摄影测量与遥感专业硕士学位.主要研究方向为机载LiDAR基础理论与应用研究. E-mail:dml19930103@163.com
王丽英
博士, 辽宁工程技术大学测绘与地理科学学教授. 2011年获得辽宁工程技术大学地图制图学与地理信息工程专业博士学位.主要研究方向为LiDAR基础理论与应用研究.本文通信作者. E-mail: wangliyinglntu@163.com
https://m.sciencenet.cn/blog-3291369-1373679.html
上一篇:基于问题性质的分布式低碳并行机调度算法研究
下一篇:交互式箱粒子标签多伯努利机动目标跟踪算法