博文
未建模动态对Buck变换器滑模控制系统的影响分析
|
引用本文
王艳敏, Paulo Fecundo Adelson, 于玲, 牛子铭, 英钊. 未建模动态对Buck变换器滑模控制系统的影响分析. 自动化学报, 2020, 46(11): 2472-2478 doi: 10.16383/j.aas.c180535
Wang Yan-Min, Paulo Fecundo Adelson, Yu Ling, Niu Zi-Ming, Ying Zhao. Influence of unmodeled dynamics on sliding mode controlled Buck converter. Acta Automatica Sinica, 2020, 46(11): 2472-2478 doi: 10.16383/j.aas.c180535
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180535
关键词
滑模控制,未建模动态,传感器,奇异摄动,描述函数法
摘要
研究传感器未建模动态对Buck变换器滑模控制系统的性能影响, 提出一种基于奇异摄动理论的稳定性和输出电压谐波分析的新方法.给出滑模控制器的参数整定方法, 选取传感器的上升时间作为摄动时间, 建立其未建模动态的奇异摄动模型, 在多时间尺度框架下, 揭示传感器稳定输出与摄动时间的影响关系.在此基础上, 构造一个类Lyapunov函数分析未建模动态对整个闭环控制系统的稳定性影响, 证明未建模动态诱发谐波的必然性.针对输出电压的谐波, 在频域内利用描述函数法推导出未建模动态摄动时间与其谐波幅值和频率的数学影响关系.仿真结果验证所提方法的正确性和有效性.
文章导读
大量研究证明滑模控制已成为电力变换器领域一种有效的鲁棒控制方法[1].然而, 滑模控制的切换非线性和电路本身的未建模动态始终是制约其实际应用的关键问题, 且两者相互影响, 都会导致输出电压谐波增加, 甚至破坏系统的稳定性.
未建模动态普遍存在于实际系统, 通常来源于系统建模过程中忽略的传感器、执行器、高阶状态项等, 其特点是具有较小的时间常数、不可测量性, 但其影响不可忽略[2].目前对其研究主要集中在未建模动态的克服和补偿两个方面[3-4].然而, 目前滑模控制领域却对未建模动态研究较少, 其根本原因归结于滑模控制的切换非线性.
从数学机理上, 滑模控制的切换控制与其控制律中包含的非线性函数sgn(⋅)有关, 进而诱发抖振问题, 严重制约滑模控制的实际应用.抖振问题诱发机理复杂, 系统建模、控制器设计、离散化实现等诸多环节皆可能导致, 表现为光滑的理论计算值与有限频率和幅值的锯齿信号的叠加, 进而不可避免会激发隐含的未建模动态对系统稳定性和动静态性能的影响.同时, 未建模动态又反过来加重滑模控制系统的抖振现象, 文献[5]证明即使理论上可做到完全无抖振的高阶滑模控制系统, 在未建模动态存在时, 同样也会诱发抖振问题.
当前, 如何在频域内量化研究抖振问题成为滑模控制领域的研究焦点.例如Levant等利用傅里叶级数展开法描述抖振信号的幅频特性[5]; Boiko等引入描述函数法近似分析抖振问题[6]; Goncalves等结合Poincare理论和LMI法来优化系统输出的抖振信号, 实现对抖振问题的参数可控化[7]; Boiko利用根轨迹法研究外部输入下的抖振信号幅频特性[8].然而, 现有研究多局限于线性时不变系统; 从数学机理研究方面, 多围绕着非线性函数sgn(⋅)的线性化来展开, 但均未考虑未建模动态和滑模切换非线性sgn(⋅)两者耦合对系统的影响.
针对Buck变换器滑模控制系统, 本文考虑传感器未建模动态的存在, 从数学机理上研究未建模动态和滑模切换非线性sgn(⋅)作用下的系统稳定性和输出电压谐波问题.建立未建模动态的奇异摄动模型, 给出滑模控制器的设计和未建模动态对传感器稳定输出的影响关系; 通过模型等价变换和构造一个类Lyapunov函数, 揭示未建模动态诱发谐波的必然性.并应用描述函数法分析Buck变换器的输出电压谐波, 推导出其谐波幅值和频率与未建模动态的影响关系.最后, 通过仿真证明所提方法的正确性.
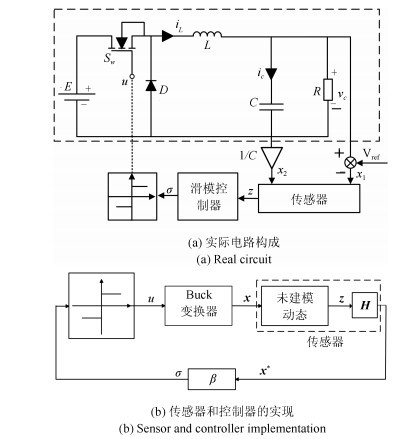
图 1 Buck变换器滑模控制系统框图
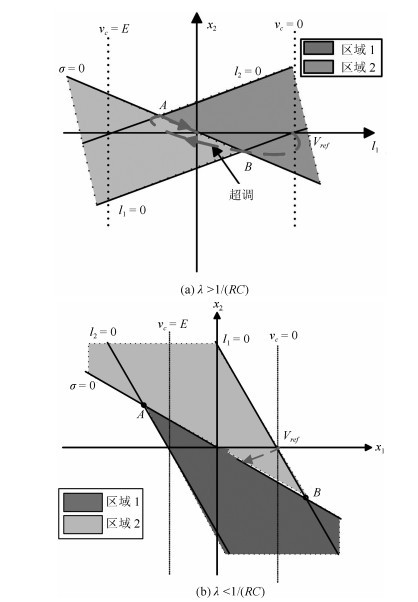
图 2 Buck变换系统滑动模态的存在区域

图 3 Buck变换器滑模控制系统的简化框图
针对Buck变换器滑模控制系统, 本文研究了传感器未建模动态对其稳定性和输出电压谐波的影响.基于奇异摄动理论的多时间尺度特性, 建立传感器未建模动态的模型; 拓展实现了描述函数法在非线性系统中抖振问题的量化分析, 从数学机理上揭示传感器未建模动态和滑模切换非线性sgn(⋅)共同影响下的Buck变换器输出电压谐波的幅频特性.最后, 通过仿真验证理论研究的正确性.研究结果将对滑模控制系统的实用化和工程化研究提供重要的理论借鉴价值.
作者简介
PAULOFecundo Adelson
PAULO Fecundo Adelson 哈尔滨工业大学硕士研究生. 2016年获得Faculdade Pitagoras de Ipatinga本科学位.主要研究方向为电力变换器非线性控制与滑模控制. E-mail: adelsondepaulo@hotmail.com
于玲
中国家用电器研究院部长/高级工程师. 2000年获得哈尔滨工业大学学士学位, 2014年获得北京交通大学硕士学位.主要研究方向为非标控制系统的定向研制, 传统/智能零部件产品产业化应用及测试方法的研究. E-mail: yul@cheari.com
牛子铭
哈尔滨工业大学硕士研究生. 2019年获得哈尔滨工业大学学士学位.主要研究方向为电力变换器非线性控制. E-mail:19S006062@stu.hit.edu.cn
英钊
哈尔滨工业大学硕士研究生. 2019年获得哈尔滨工业大学学士学位.主要研究方向为电力变换器非线性控制. E-mail:yingxiaoxiaozhao@163.com
王艳敏
哈尔滨工业大学讲师. 2009年获得哈尔滨工业大学博士学位.主要研究方向为滑模控制, 电力变换器非线性控制.本文通信作者. E-mail: wangyanmin@hit.edu.cn
https://m.sciencenet.cn/blog-3291369-1373987.html
上一篇:一种高分辨率遥感影像道路提取方法
下一篇:工业人工智能专题序言