博文
外部干扰和随机DoS攻击下的网联车安全H∞ 队列控制
|
引用本文
宋秀兰, 李洋阳, 何德峰. 外部干扰和随机DoS攻击下的网联车安全H∞ 队列控制. 自动化学报, 2024, 50(2): 348−355 doi: 10.16383/j.aas.c230327
Song Xiu-Lan, Li Yang-Yang, He De-Feng. Secure H∞ platooning control for connected vehicles subject to external disturbance and random DoS attacks. Acta Automatica Sinica, 2024, 50(2): 348−355 doi: 10.16383/j.aas.c230327
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c230327
关键词
网联自主车辆,队列控制,安全控制,随机DoS攻击,稳定性
摘要
针对网联车队列系统易受到干扰和拒绝服务(Denial of service, DoS)攻击问题, 提出一种外部干扰和随机DoS攻击作用下的网联车安全H∞ 队列控制方法. 首先, 采用马尔科夫随机过程, 将网联车随机DoS攻击特性建模为一个随机通信拓扑切换模型, 据此设计网联车安全队列控制协议. 然后, 采用线性矩阵不等式(Linear matrix inequality, LMI)技术计算安全队列控制器参数, 并应用Lyapunov-Krasovskii稳定性理论, 建立在外部扰动和随机DoS攻击下队列系统稳定性充分条件. 在此基础上, 分析得到该队列闭环系统的弦稳定性充分条件. 最后, 通过7辆车组成的队列系统对比仿真实验, 验证该方法的优越性.
文章导读
近年来, 由于在提高道路安全性和通行效率等方面的优势, 网联自主车辆得到了学术界和工业界的广泛关注[1]. 通过车−车(Vehicle to vehicle, V2V)或车−基础设施无线网络交换和共享数据, 并综合利用车载传感、先进计算和智能控制技术实现网联自主车辆协同队列驾驶. 然而, 开放的无线网络信息传输和车辆高速移动特性使得网联自主车辆队列控制系统容易遭受恶意网络攻击, 如数据窃密、篡改和中断等[2], 给用户隐私、财产和安全带来极大威胁.
攻击者通过在介质访问控制层, 中断数据包传输或通过注入恶意软件破坏网络组件, 以一种隐秘和不可预测的方式攻击网络系统[3]. 目前, 网联车潜在的攻击类型包括欺骗攻击、重放攻击和拒绝服务(Denial of service, DoS)攻击[4], 其中DoS攻击是最常见的恶意网络攻击, 其攻击特性是干扰车联网络的射频或用大量请求阻止V2V网络接入, 以阻止车辆之间的信息交互, 进而破坏车辆间的数据传输和队列控制系统. 对此, 相关学者探索DoS攻击的网联车安全队列控制方法, 并取得了一些尝试性成果. 如文献[5]将DoS攻击建模为连续数据包丢失, 设计基于线性矩阵不等式(Linear matrix inequality, LMI)的网联车DoS攻击弹性控制器; 文献[6]将DoS攻击结合不均匀采样建模为一个时滞系统, 再基于Lyapunov稳定性理论、Jensen不等式方法和拓扑矩阵解耦技术, 建立了队列稳定跟踪的充分条件. 目前, 大部分文献将网联车DoS攻击建模为网络化时延或丢包系统[5-7], 但网联车在无DoS攻击下, 通信过程会存在时延和丢包现象, 所以这些模型无法有效表征DoS攻击对网联车队列系统的影响.
近期有学者采用图论表示通信拓扑, 进而将DoS攻击建模成拓扑切换的形式, 如文献[8-9]将网联车受到的DoS攻击建模为拓扑切换模型, 并引入恢复机制提出弹性控制协议设计, 保证了网联车队列系统在DoS攻击下的内部稳定性. 在实际中, 大多数DoS攻击会充分利用随机发生的网络负载、网络拥塞和网络传输效率发起攻击[10-11], 即DoS攻击发生具有很强的随机性, 会严重恶化现有网联车队列系统的稳定性和控制性能. 但据笔者所知, 目前DoS攻击下的网联车安全队列控制方法还未充分考虑DoS攻击的频率及强度的随机性的特性.
除随机DoS攻击外, 外部干扰也是网联车队列系统中不可忽视的重要因素. 为了抑制外部干扰对网联车队列系统的不利影响, Ploeg等[12]采用H∞控制方法, 建立干扰下的车辆队列L2弦稳定性; 文献[13]提出一种显式处理外部扰动的车辆队列min-max预测控制方法. 值得注意的是, 目前车辆队列弦稳定性的结果大多考虑前导车的外部扰动; 然而, 由于地面摩擦、阵风和滚转阻力等不确定性影响, 跟随车辆也会受到外部干扰, 有必要研究前导车和跟随车同时受外部干扰下的网联车安全队列控制问题.
针对各辆网联车都可能同时受到随机DoS攻击和外部干扰影响的场景, 本文提出一种新的网联车安全H∞队列控制方法. 首先, 将随机DoS攻击导致的信道拥塞建模为服从马尔科夫随机过程的通信拓扑切换模型. 然后, 再设计拓扑恢复机制, 使得在攻击停留时间内将瘫痪通信拓扑恢复为正常通信拓扑. 接着, 采用H∞控制方法抑制网联车的外部干扰影响, 设计具有稳定性保证的网联车安全H∞队列控制器. 在此基础上, 建立在随机DoS攻击和外部干扰作用下的网联车队列系统的弦稳定性充分条件. 最后, 考虑变速典型交通场景, 通过仿真比较DoS攻击下的网联车安全队列控制方法, 验证本文方法的优越性.
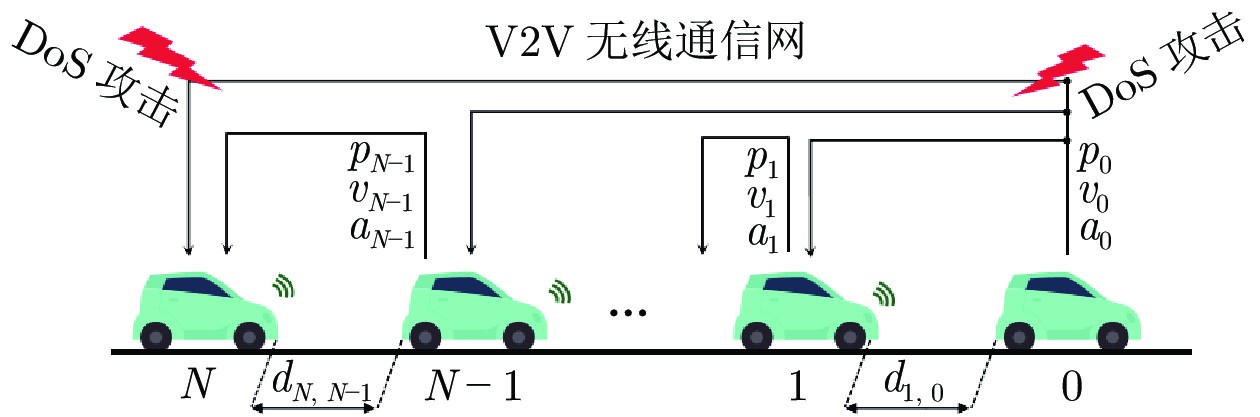
图 1 DoS攻击下的网联车队列示意图
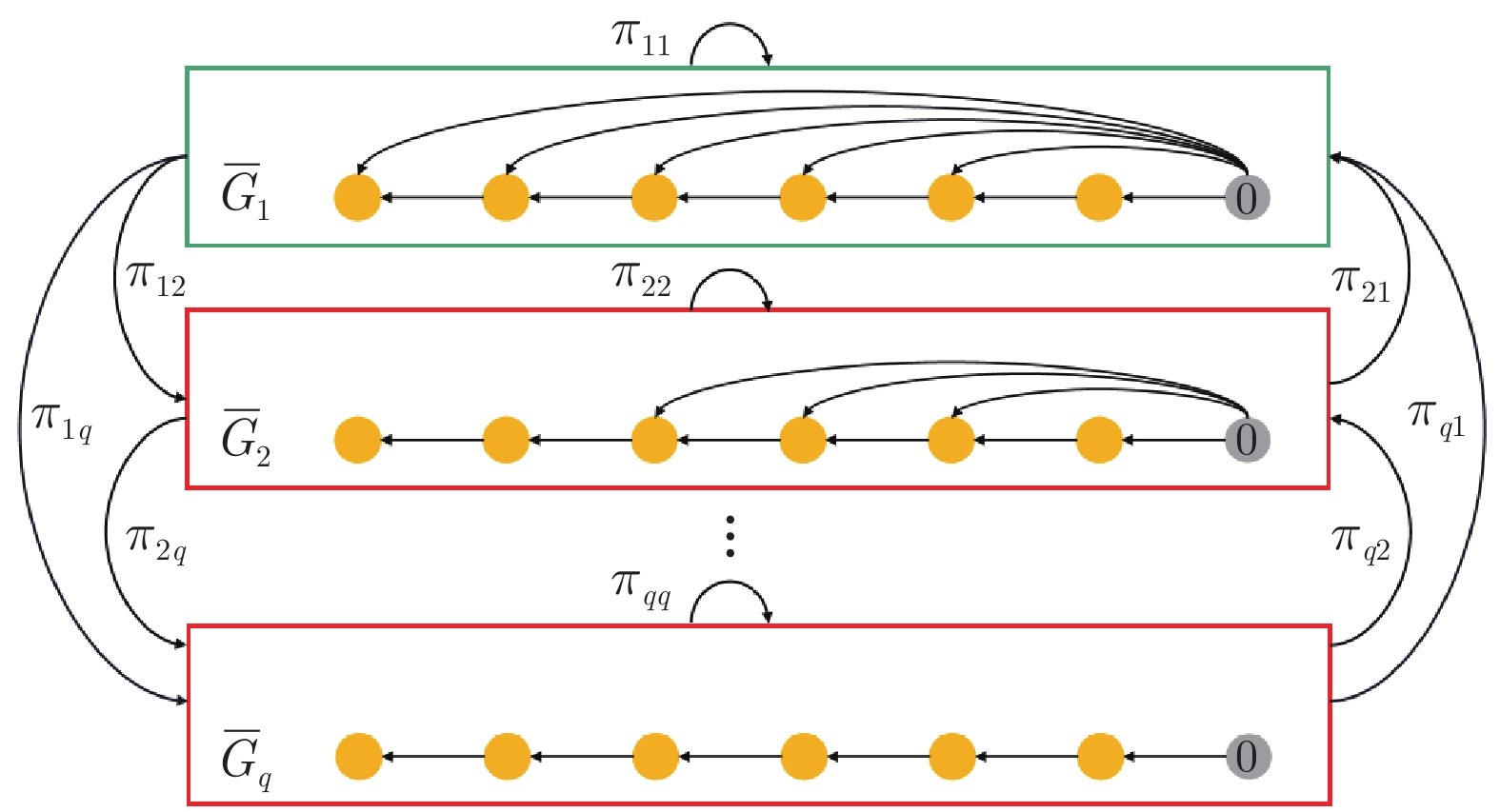
图 2 DoS攻击造成的拓扑切换示意图
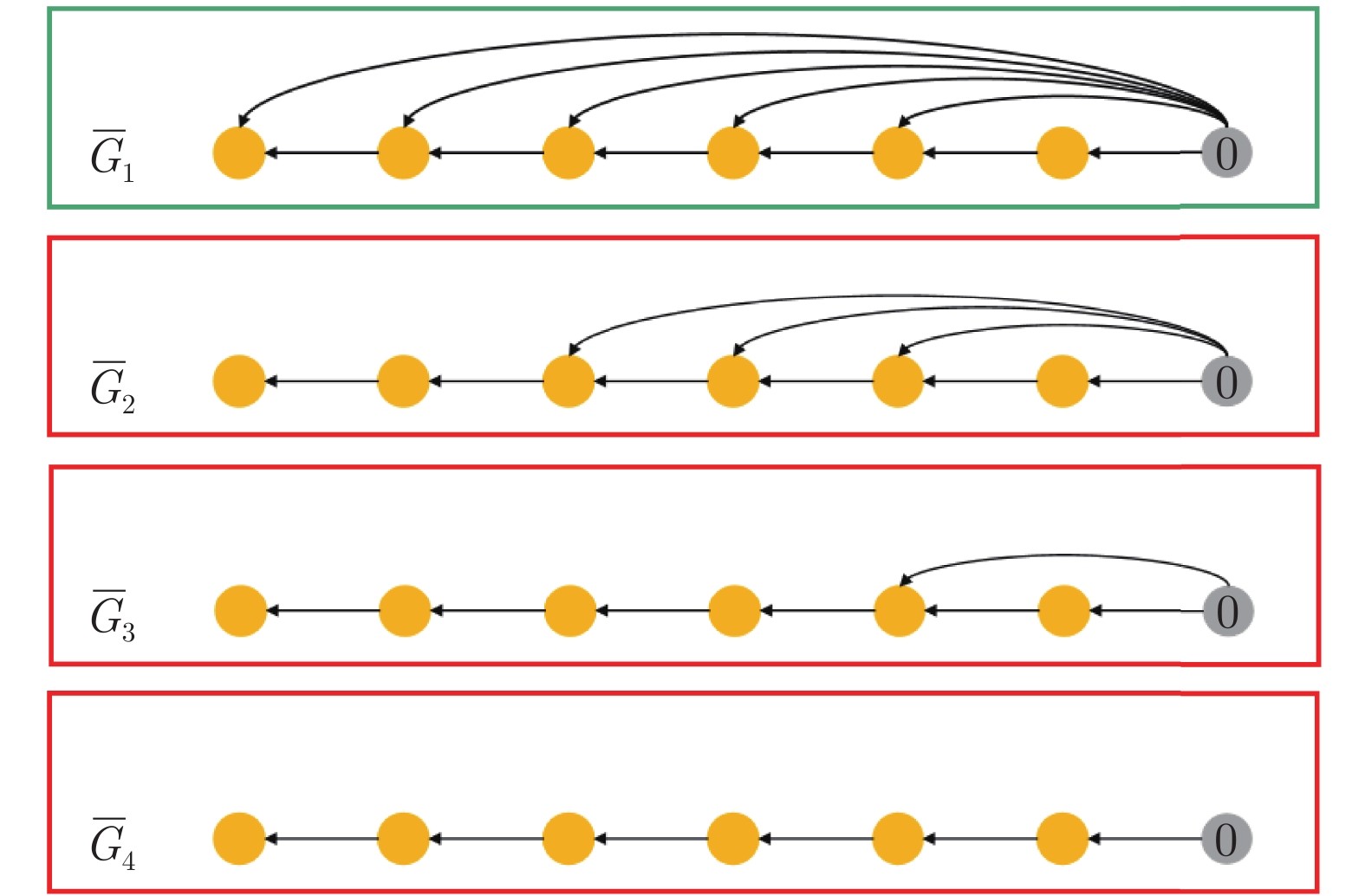
图 3 4种常见的通信拓扑示意图
针对车辆外部干扰和随机DoS攻击下的安全队列控制问题, 本文给出一种基于H∞的网联车安全队列控制方法. 首先, 将车辆随机DoS攻击建模为马尔科夫通信拓扑切换随机过程. 然后, 考虑车辆外部干扰, 采用LMI方法计算控制器增益和耦合系数. 在此基础上, 得到车辆队列闭环系统的稳定性和队列弦稳定性充分性条件. 最后, 对比仿真结果验证了本文方法在抑制外部干扰和随机DoS攻击产生的影响方面具有优越性. 后续将进一步研究通信时延和车辆启动或刹车过程产生的控制时延对网联车安全队列性能的影响.
作者简介
宋秀兰
浙江工业大学信息工程学院副教授. 主要研究方向为多媒体无线通信, 网联车辆安全队列控制. 本文通信作者. E-mail: songxl2008@zjut.edu.cn
李洋阳
浙江工业大学信息工程学院硕士研究生. 主要研究方向为车辆安全队列控制. E-mail: seanlee1122@163.com
何德峰
浙江工业大学信息工程学院教授. 主要研究方向为智能预测控制, 多智能体分布式估计与协同控制和安全控制理论. E-mail: hdfzj@zjut.edu.cn
https://m.sciencenet.cn/blog-3291369-1424038.html
上一篇:基于真实退化估计与高频引导的内窥镜图像超分辨率重建
下一篇:虚假数据注入攻击下多机器人系统协同寻源