博文
生物集群能量高效利用机制研究综述
|
引用本文
吴晓阳, 邹尧, 付强, 贺威. 生物集群能量高效利用机制研究综述. 自动化学报, 2024, 50(3): 431−449 doi: 10.16383/j.aas.c230161
Wu Xiao-Yang, Zou Yao, Fu Qiang, He Wei. An overview of energy efficient utilization mechanism of biological colonies. Acta Automatica Sinica, 2024, 50(3): 431−449 doi: 10.16383/j.aas.c230161
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c230161
关键词
生物集群,能量高效利用,节能机制,编队
摘要
近年来, 智能体集群的能量高效利用(Energy efficient utilization, EEU)机制已经成为多智能体系统领域的热点问题, 如何使用有限的能量资源实现系统性能最优是该问题的核心研究内容. 考虑到智能体集群与生物族群的相似性, 探究生物族群的能量高效利用机制对提升智能体集群节能性能有着重要的研究价值. 为此, 首先介绍不同生物族群中蕴含的能量利用机制, 并根据节能方式的差异分成3类, 流体优势利用机制、流体阻碍克服机制和热量交换与扩散机制; 然后对这些机制进行总结与分析, 并提出一种具有一般性的能量高效利用模型; 最后, 探讨能量高效利用机制在多智能体系统应用中面临的挑战和发展趋势.
文章导读
随着网络化技术在智能机器人应用方向的快速发展, 使得由多智能机器人组成的无人集群系统的应用范围也愈发广泛. 例如, 无线通讯[1-6]、高效能感知[7-8]、物联网系统[9-10]、未知环境信息采集[11-12]、搜救定位[13-14]、森林火情监测[15-16]、环境监测与动植物保护[17-19]、水文气象信息采集[20-21]等. 多智能体系统具有的自主性、协调性和分布性等特性使其能够解决诸多实际问题, 但是由于各智能体有限的能量资源, 多智能体系统的应用性能也受到限制[22-24]. 考虑到多智能体系统运动与生物族群的社会性行为存在一定的相似性, 因此分析生物族群在集群运动过程中的节能行为, 将是提高多智能体系统能量利用效率的有效方法.
对于生物族群而言, 能量获取的渠道是有限的, 而为了维持正常的生命体征和运动能力, 能量消耗是不可避免的. 为了获得更大的生存几率, 生物会想尽一切办法节省能量, 能够实现能量高效利用(Energy efficient utilization, EEU)的物种才能适应残酷的生存环境. 从物理的角度来看, 生物会通过保持与同类个体之间的物理距离实现节能效果, 也就是组成生物集群. 组成集群就是将多个实时能量系统耦合成一个更复杂的集成体, 在能量集成系统中相邻个体之间通过利用转换能量构建能量高效利用机制. 鸟群、鱼群中成员通过利用相邻个体为克服流体阻力而产生的流体动力学优势, 进而实现自身的节能效果[25-30]; 帝企鹅族群、啮齿类动物幼崽通过组成拥挤团体合理利用同伴的体温减少能量的过度消耗[31-32]; 棘刺龙虾、三叶虫等节肢动物通过合理利用其他个体为克服阻力而产生的“低阻力区”实现自身的能量高效利用[33-34].
近年来, 多智能体技术对生物族群的借鉴主要集中在两个方面, 学习生物群体行为的启发式优化算法[35-38]和借鉴生物集群运动模式的智能体编队控制[39]. 虽然主流的智能体仿生技术研究大多致力于直接模仿生物族群行为, 但是仍有部分学者利用多智能体技术开展对生物族群的能量高效利用机制研究. 北京大学谢广明团队以仿生机器鱼为平台探究鱼群能量利用机制, 通过直接测量集群运动的功耗, 得出了集群节能的行为准则[40]. 北京科技大学贺威团队以仿生扑翼机器人[41-42]为平台探究鸟群能量高效利用机制, 从理论角度分析了构型参数对编队能耗的影响[43-45]. 开展生物族群能量高效利用机制的研究一方面有助于揭示生物群体行为模式, 另一方面为多智能体系统编队设计和控制提供新依据和新方向, 即通过提升执行效率来满足任务需求.
基于节能方法的分类方式有助于研究人员更好地研究传统生物族群中蕴含的能量高效利用机制. 本文对当前生物族群节能机制研究领域的主要研究内容进行了回顾和分析, 整体结构安排如下: 第1节简要介绍本文提出的“能量高效利用”模型; 在第2 ~ 4节中分别使用本文提出的“能量高效利用”模型对流体优势利用机制、流体阻碍克服机制和热量交换与扩散机制的实现方式和适用生物族群进行讨论, 并对这些生物族群的能量高效利用机制的研究进展进行综述; 第5节介绍能量高效利用机制研究面临的挑战; 第6节总结全文并展望能量高效利用机制在多智能体系统的应用.
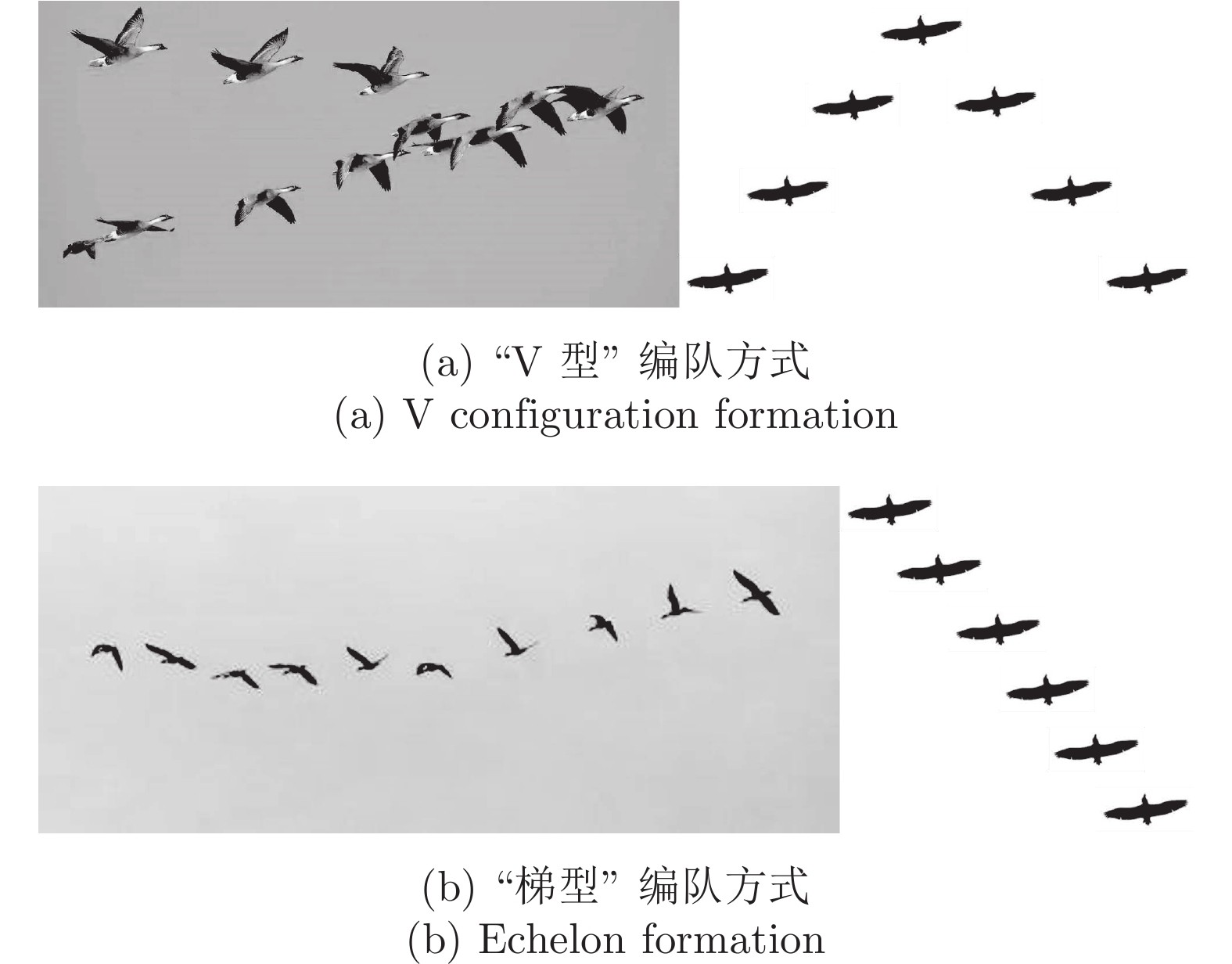
图 1 迁徙鸟群的线性编队方式
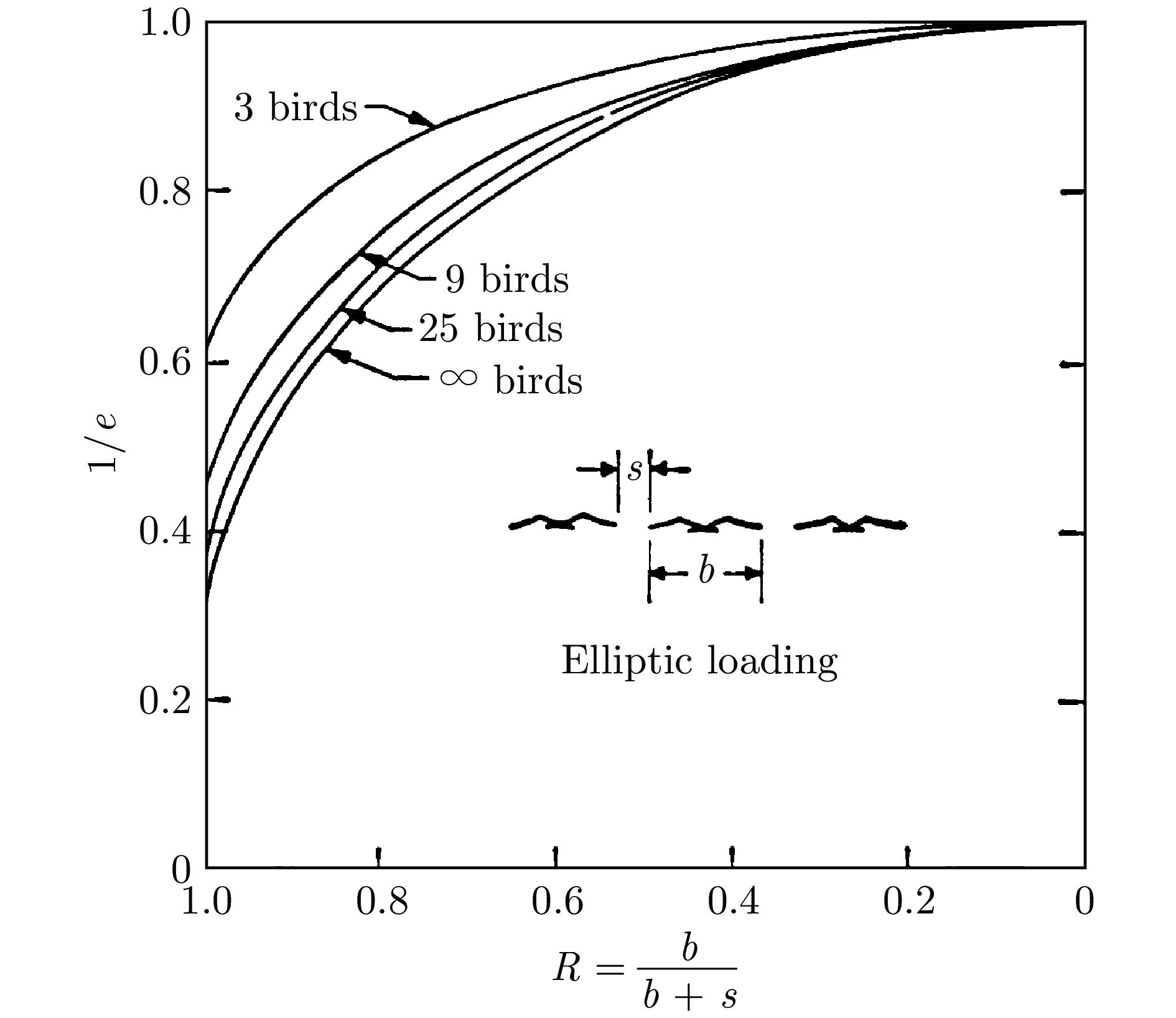
图 2 鸟群编队的诱导阻力比率[27]
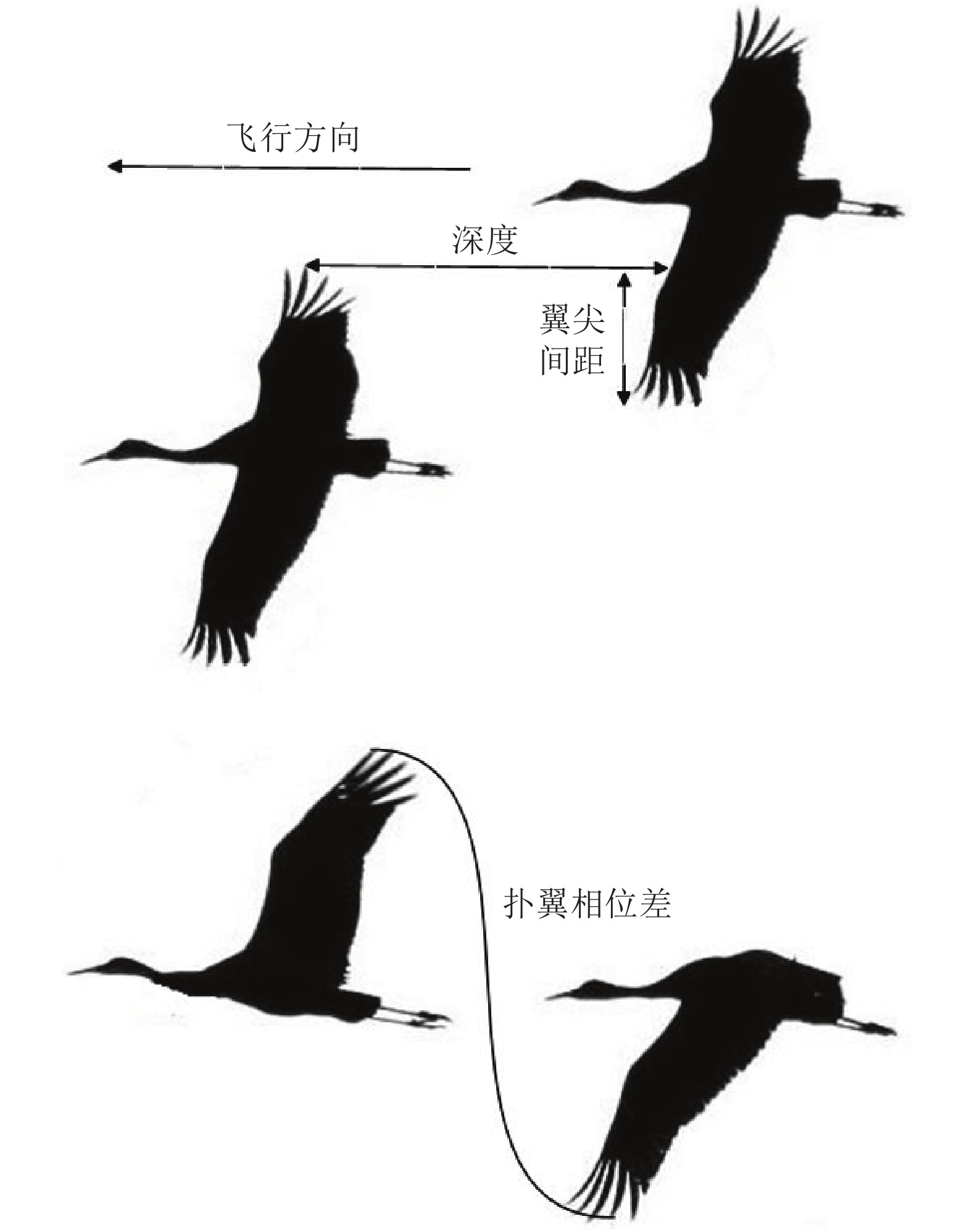
图 3 相邻鸟类间的“翼尖间距”、“深度”和“扑翼相位差”定义
虽然多智能体系统的应用领域非常广泛, 但是多智能体系统的整体性能却受限于单个智能体能量资源的不足, 因此智能体集群的能量高效利用机制已经成为多智能体系统领域的热点问题. 考虑到多智能体系统与生物族群的相似性, 本文基于仿生学思想对生物族群的能量高效利用机制进行了综述, 根据节能方式的差异将节能机制分为流体优势利用机制、流体阻碍克服机制和热量交换与扩散机制. 在分类的基础上系统梳理了不同生物族群节能机制的研究进展. 表2总结了不同生物族群的节能效果, (这些节能效果以能耗降低程度、摆动频率降低程度、耗氧量降低程度、阻力减免程度等指标描述)以及EEU模型的估计结果. 从表2中我们可以发现, 由于缺乏编队参数和实验数据, 导致本文提出的EEU模型在应用过程中精度不足, 无法有效估计生物族群的节能效果. 在未来的研究中, 应当进一步深化对生物族群节能机制的认识, 提高EEU模型的精度.
关于生物族群能量高效利用机制如何应用于多智能体系统的问题, 未来需要关注的方向可以总结为:
1)生物节能机制的应用性研究. 从现有的研究结果来看, 研究不同生物族群的节能机制是出于解释自然现象的目的, 由于智能体集群与生物族群的现实意义不同, 针对生物族群的研究结论不能直接应用于智能体集群. 但是, 在生物研究中采用的研究方法仍然有极大的借鉴意义, 譬如通过精密测量仪器和流体仿真从微观角度探究生物个体对集群产生的物理影响. 这些研究思路和研究方法对研究智能体集群的能量高效利用机制很有帮助.
2)基于运动机理的能量研究. 从生物族群的研究过程中我们可以发现, 研究人员不断探究族群中个体与个体、个体与集群之间的关系, 并以此为基础研究生物族群能量机制的实现方式. 我们在智能体集群的能量研究中, 也应当从个体运动学和动力学的角度出发[151-152], 建立个体运动模型[153-155], 探究个体的能量转换过程, 进而研究个体对其他个体、集群和环境的影响.
3)集群能量流动过程研究. 本文为便于讨论不同生物节能机制的节能效果, 通过分析集群能量转换过程, 对生物集群的能量形式进行了简单分类, 然后根据分类建立能量高效利用模型. 但是从文中对不同生物族群的分析过程可以看出, 受限于对生物节能机制认识的不足, 该模型的分析结果与生物实验的结果仍有较大差异. 虽然研究人员对智能体的认知程度要更加深刻, 但是我们不能完全依赖微观认识构建能量模型, 仍然要从能量转换与流动的角度建立宏观模型.
4)基于任务规划的能量机制研究. 生物个体出于进化与生存的目的组成集群, 节能机制正是实现这一目的的有效方法, 而智能体组成集群是出于任务需要, 两者存在的意义不同, 节能机制的实现方式也应当不同. 因此, 有必要进一步深入研究基于任务规划的能量高效利用机制.
5)基于生物集群运动规则的多智能体一致性研究. 一致性问题作为多智能体之间实现协调控制的基础, 具有重要的研究价值和现实意义. 多智能体系统的一致性是指随时间推移, 系统中所有个体的某一状态(方向、速度等)趋于一致. 这一点在生物集群也多有体现, 如鱼群的聚集与分散、鸟群编队的结构变化等, 说明生物集群中也存在某种相互作用、传递信息的规则. 因此, 研究生物集群维持规则对多智能体研究十分有价值.
作者简介
吴晓阳
北京科技大学智能科学与技术学院博士研究生. 2017年获得河北工业大学学士学位. 2020年获得北京科技大学硕士学位. 主要研究方向为扑翼飞行机器人和飞行器控制. E-mail: wxy1995_jz@163.com
邹尧
北京科技大学智能科学与技术学院教授. 2010年获得大连理工大学学士学位, 2016年获得北京航空航天大学博士学位. 主要研究方向为飞行器控制, 多智能体系统. E-mail: zouyao@ustb.edu.cn
付强
北京科技大学智能科学与技术学院副教授. 2009年获得北京交通大学学士学位, 2016年获得北京航空航天大学博士学位. 主要研究方向为视觉导航, 视觉伺服和扑翼飞行机器人. 本文通信作者. E-mail: fuqiang@ustb.edu.cn
贺威
北京科技大学智能科学与技术学院教授. 2006年获得华南理工大学自动化学院学士学位, 2011年获得新加坡国立大学电气工程与计算机科学系博士学位. 主要研究方向为仿生扑翼飞行机器人, 智能无人系统和智能控制. E-mail: weihe@ieee.org
https://m.sciencenet.cn/blog-3291369-1427457.html
上一篇:《自动化学报》2023年50卷3期目录分享
下一篇:模糊认知图学习算法及应用综述