博文
圣地亚哥州立大学LS Yousuf:Lyapunov指数、功率谱分析和Poincaré图的凸轮从动件系统接触力非线性动力
||
图 文 导 读
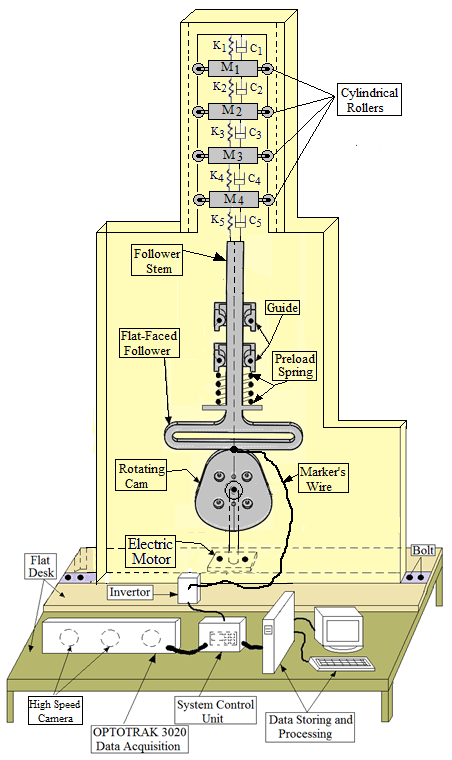
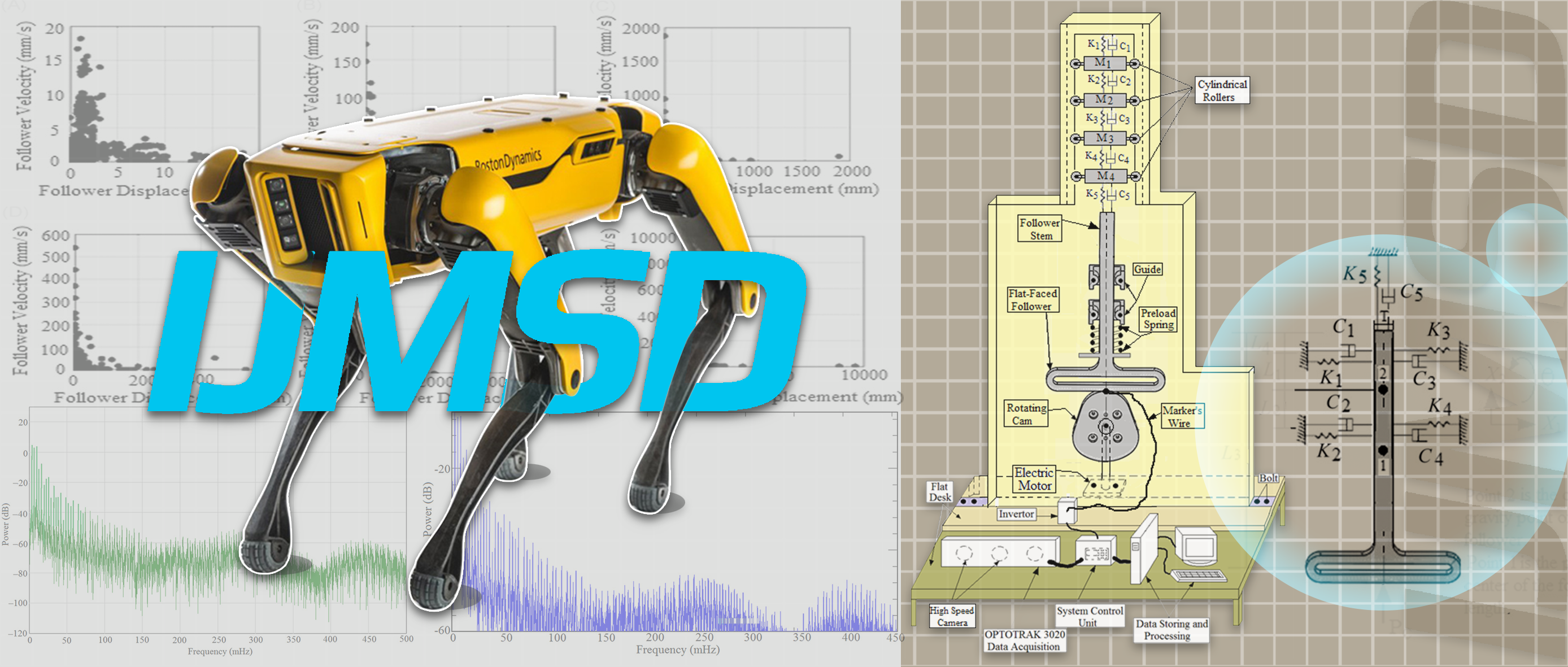
仿生四足机器人(bionic quadruped robot)是机器人研究的重要方向之一,因其灵活度高、环境适应力强、稳定性好,故在物资运输、工程勘探、抢险救援、军事察打等领域具有广阔应用前景。通过连杆机构将凸轮-从动件系统应用于仿生四足机器人,在从动装置最末端使用多减振器(弹簧-阻尼-质量)系统,能有效改善机器人动态性能,并减小凸轮与从动装置之间的分离高度。
美国圣地亚哥州立大学Louay S. Yousuf助理教授在《国际机械系统动力学学报(英文)》(International Journal of Mechanical System Dynamics, IJMSD)发表“Lyapunov指数、功率谱分析和Poincaré图的凸轮从动件系统接触力非线性动力学分析”研究论文。该文采用最大Lyapunov指数、快速傅里叶变换功率密度函数和从动装置非线性动力学现象产生的Poinaré图来检测凸轮与从动装置之间的分离情况。针对不同的凸轮速度和不同从动导引件的内部距离,研究了凸轮与从动装置之间的分离。研究结果表明,当凸轮和从动件永久接触时,没有势能损失,也没有冲击或恢复;而存在分离时,凸轮与从动件之间的分离高度会随着恢复系数的增加而增加。该研究为将凸轮-从动件系统应用于仿生四足机器人提供了理论指导和实验参考。
The aim of this article is to detect the detachment between the cam and the follower using the largest Lyapunov exponent parameter, the power density function of fast Fourier transform, and Poinaré maps due to the nonlinear dynamics phenomenon of the follower. The detachment between the cam and the follower was investigated for different cam speeds and different internal distances of the follower guide from inside. This study focuses on the use of the cam–follower system with a bionic quadruped robot through a linkage mechanism. Multishock absorber (spring–damper–mass) systems at the very end of the follower were used to improve the dynamic performance and to reduce the detachment between the cam and the follower. The SolidWorks program was used in the numerical solution, while a high-speed camera at the foreground of the OPTOTRAK 30/20 equipment was used to identify the follower position. The friction and impact were considered between the cam and the follower and between the follower and its guide. In general, when the cam and the follower are in permanent contact, there is no loss in potential energy, and no impact or restitution. The detachment between the cam and the follower increases with increasing coefficient of restitution in the presence of the impact. Keywords: nonlinear dynamics, Lyapunov exponent, non-periodic motion, contact force DOI: 10.1002/msd2.12025 Share this article: https://onlinelibrary.wiley.com/doi/10.1002/msd2.12025 Cite this article: Yousuf LS. Nonlinear dynamics investigation of contact force in a cam-follower system using the Lyapunov exponent parameter, power spectrum analysis, and Poincaré maps. Int J Mech Syst Dyn. 2022;2(2):214-230. 该文亮点: 作 者 简 介 期 刊 简 介 IJMSD由来自18个国家的20位院士、17位国际学会主席、20位国际期刊主编等69位科学家和国际出版巨头美国Wiley出版社合作创立。主编为南京理工大学芮筱亭院士,3位合作主编分别是加拿大皇家学会会士、加拿大工程院院士、欧洲科学院院士、加拿大麦吉尔大学Marco Amabili院士,国际理论与应用力学联盟(IUTAM)前司库、国际多体系统动力学协会(IMSD)前主席、德国斯图加特大学Peter Eberhard教授和美国工程院及科学院两院院士、欧洲科学院外籍院士、中国科学院外籍院士、美国工程科学协会前主席、美国西北大学Yonggang Huang院士。 IJMSD旨在用机械系统动力学科学与技术为现代装备设计、制造、试验、评估和使用全生命周期性能的提升提供先进的理论、软件、方法、器件、标准,为全球科学家和工程专家提供广泛的机械系统动力学国际交流平台。IJMSD强调从“系统”视角及系统级工具理解动力学,所涉及的机械系统不仅包括各种不同尺度的机械系统和结构,还包括具有多物理场/多学科特征的综合机械系统。 目前,IJMSD已被ESCl, Scopus, Inspec, DOAJ等收录。2023年免收出版费,并为已录用稿件免费提供专业语言润色服务,欢迎全球科学家投稿交流。 期刊主页: https://onlinelibrary.wiley.com/journal/27671402 投稿网址: https://mc.manuscriptcentral.com/ijmsd 编辑部邮箱:office@ijmsd.net 长按下图,扫码添加小编微信,邀请您进入IJMSD读者交流群,群内不定期分享期刊论文,并开展学术写作讲座等各项活动。 备注“姓名-单位-IJMSD读者” 请长按二维码 关注IJMSD Dr. Louay S. Yousuf A Visiting Assistant Professor at San Diego State University for one academic year in the Department of Mechanical Engineering. He received his Ph.D. from the University of Baghdad, Baghdad, Iraq and was a Postdoctoral Fellow at the Mechanical Engineering Department, University of Auburn, Alabama before joining San Diego State University. His research interests include non-linear dynamics of cam and follower, composite materials, finite element method, vibrations, and experimental stress analysis.
Dr. Louay S. Yousuf A Visiting Assistant Professor at San Diego State University for one academic year in the Department of Mechanical Engineering. He received his Ph.D. from the University of Baghdad, Baghdad, Iraq and was a Postdoctoral Fellow at the Mechanical Engineering Department, University of Auburn, Alabama before joining San Diego State University. His research interests include non-linear dynamics of cam and follower, composite materials, finite element method, vibrations, and experimental stress analysis.


https://m.sciencenet.cn/blog-3296863-1400730.html
上一篇:IJMSD | 西北工业大学许勇教授、贾万涛副教授:跳跃噪声激励下含时滞单自由度拟线性系统的动力学分析
下一篇:IJMSD | 南京理工大学王庆涛副教授、加拿大约克大学李刚强博士等:基于绝对节点坐标法的环形空间系绳运输系统动力学建模
全部作者的其他最新博文
- • IJMSD | 浙江工业大学金江明副教授:构建不对称强非线性结构声系统实现声能量非互易传递
- • IJMSD封面文章 | 青岛大学丁洁玉教授团队:基于多尺度微分代数神经网络的动力系统学习方法
- • IJMSD | 南京航空航天大学裘进浩教授团队:双向能量调节的压电分流阻尼技术及其对结构振动的抑制性能研究
- • IJMSD | 苏州大学凌明祥教授、华南理工大学张宪民教授,等:含曲轴柔性铰链的串并联柔顺机构传递矩阵建模方法
- • IJMSD Themed Collection | Vibration and Control (2022—2023)
- • IJMSD | 中国石油大学(华东)赵德敏副教授团队:温度对双层氮化硼拉伸和振动性能的影响