博文
智绘轨迹,认知未来:一种考虑驾驶风险认知的轨迹规划方法
||
智绘轨迹,认知未来:一种考虑驾驶风险认知的
轨迹规划方法
一 导读
自动驾驶车辆在复杂高动态路口场景的轨迹规划是一项充满挑战的任务,特别是在与人类驾驶车辆频繁互动时,需要考虑周边车辆不确定的驾驶行为所带来的驾驶风险。为了应对这一挑战,安徽大学王晓教授及其团队提出了一种社会适应性和安全敏感的轨迹规划(S4TP)框架,该方法特别考虑了周围人类驾驶车辆的驾驶意图,通过建立一个以自动驾驶车辆为中心的驾驶风险场模型来表示车辆对周围环境的主观风险感知,进一步应对复杂交叉路口场景中其他车辆的不确定性社会互动行为,从而在保证车辆驾驶安全的前提下,实现更加高效的自动驾驶决策。该研究形成了名为“S4TP: Social-Suitable and Safety-Sensitive Trajectory Planning for Autonomous Vehicles”的论文成果,已被《IEEE Transactions on Intelligent Vehicles》期刊接受并发表在2024年第9卷第2期。
1. Wang et al. S4TP: Social-Suitable and Safety-Sensitive Trajectory Planning for Autonomous Vehicles [J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(2):3220- 3231.
2. Wang, Xiao and Tang, Ke and Dai, Xingyuan and Xu, Jintao and Du, Quancheng and Ai, Rui and Wang, Yuxiao and Gu, Weihao. S4TP: Social-Suitable and Safety-Sensitive Trajectory Planning for Autonomous Vehicles [J]. IEEE Transactions on Intelligent Vehicles, 2024, 9(2): 3220- 3231.
全文链接: https://ieeexplore.ieee.org/abstract/document/10337798或arxiv版本链接:https://arxiv.org/abs/2404.11946。
二 论文介绍
1 研究背景
自动驾驶车辆(AVs)在公共道路上的行驶需要与人类驾驶车辆(HDVs)进行频繁的社会互动。这些互动因为驾驶员之间不同的社会偏好而引入驾驶不确定性,导致自动驾驶车辆难以感知周围的驾驶风险场状况。在复杂的交通场景中,例如无保护左转路口和超车等,AVs需要全面感知周围环境风险方能做出安全有效的决策规划。然而,已有工作中所涉及的驾驶风险评估方式存在不足,其忽略了HDV的驾驶意图对SDV的影响,因而无法有效应对驾驶环境中的不确定性和多模态性,进而对自车周围驾驶风险的评估缺少准确性。例如,传统的基于轨迹预规划的风险研判是一种较为粗粒度的方法,其将轨迹规划分成了多模态轨迹生成与轨迹选择两个环节,该类方法与人类实际驾驶过程存在显著差异。此外,基于驾驶风险场的轨迹规划方法侧重于感知静态风险,未能有效处理复杂高动态场景中的驾驶场景,因而导致自动驾驶车辆在轨迹规划过程中变得异常困难,并且无法保证自动驾驶车辆在行使过程中的安全性。
2 框架概览
本研究提出了一种社会适应性和安全敏感的轨迹规划(S4TP)框架,主要用于解决自动驾驶对周围车辆驾驶风险感知不准确问题,其目标是为了实现自动驾驶车量安全高效的轨迹规划。该方法框架如图1所示。具体来说,S4TP包括社会感知轨迹预测(SATP)和社会感知驾驶风险场(SADRF)模块。其中,SATP利用Transformer有效编码驾驶场景信息,并在预测解码过程中融合了AV的规划轨迹进行预测。SADRF评估AV与具有不同社会交互特性的HDVs互动期间预期的周围驾驶风险程度,并以AV为中心的二维热力图形式呈现。SADRF模拟周围HDVs的驾驶意图,并基于车辆互动的表示预测轨迹。我们通过使用预测的HDVs轨迹作为输入,通过整合社交感知驾驶风险场,进一步在低风险区域内执行AV规划轨迹的实时在线优化,从而提高规划轨迹的安全性和可解释性。通过在SMARTS仿真器中进行测试,S4TP在无保护左转路口、并道、巡航和超车等复杂社会交互场景中展现了卓越的性能,实现了100%的通过率,超越了现有的最先进方法。
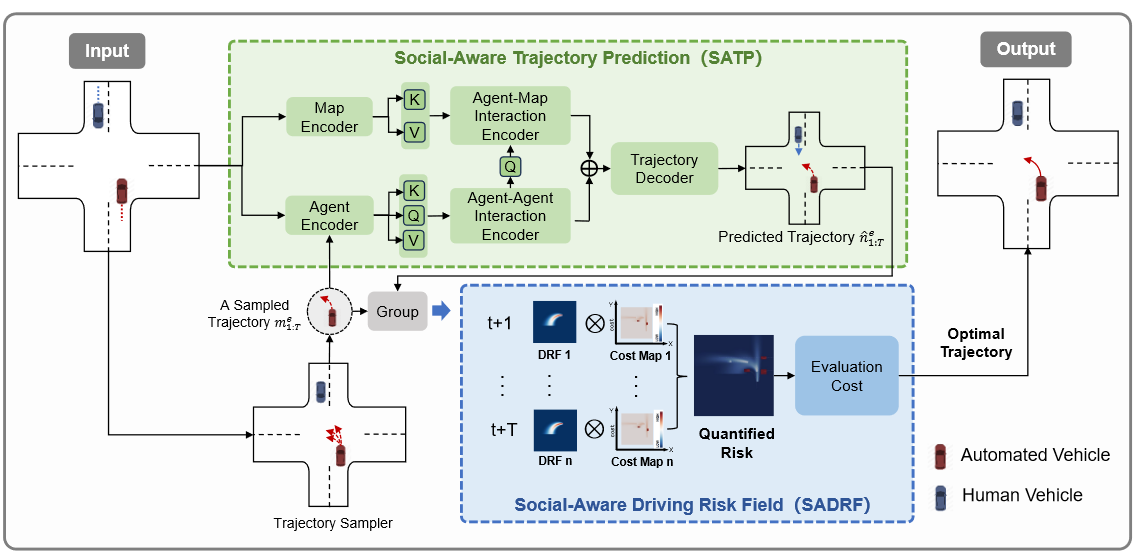
图1 S4TP模型架构
3 实验设计及验证
3.1 实验设计
(1)场景编码器:我们通过Transformer网络对场景进行编码处理。在路口场景下,对于自车周围的所有智能体$i$,编码器的输入数据包括智能体的历史状态$n_{-T_h:0}^i$和本地地图折线$\Gamma$。此外,我们明确考虑了自车与周围车辆之间的交互关系,在输入数据中加入AV的历史状态$n_{-T_h:0}^e$信息以构建完整的交互图。为了保持张量的固定形状,我们考虑将历史轨迹中的缺失的时间步以及地图折线中的缺失点填充为零。我们的模型在实验中选用一定数量的靠近AV的智能体(实验中设置为5个),并在数量不足时进行零填充。原始输入的地图折线通过多层感知机(MLP)进行编码。对于自车周围其他的智能体的历史轨迹信息,我们采用基于Transformer的自注意层来进行编码处理,用于提取历史轨迹上的时间关系。正如图中所示,我们使用分层的Transformer模块对agent-agent以及agent-map的关系进行编码。具体而言,我们通过将所有agent表示为所构建的交互图中的节点形式,并使用自注意力Transformer模块来处理图中信息已捕获图中agent-agent之间的交互关系。然后结合交叉注意力Transformer层来获取agent-map之间的关系。其中,query作为智能体的交互特征,key和value作为地图折线的特征向量表示。最后,对于每个周围的agent,其历史特征、交互特征和地图注意力特征被连接并通过轨迹预测解码器传递,以生成预测的未来轨迹。
(2)轨迹预测解码器:相比其他循环神经网络(如RNN或者LSTM), 门控循环单元(GRU)具有更少的参数且不需要显式的记忆单元,因此在处理长序列时具有更好的表现。我们在模型中使用GRU通过自回归的方式解码agent在未来一段时间内的状态序列。为了明确建模AV对周围agent未来动作的影响,我们将自车时刻$t$的运动状态$m_t^e$输入到GRU中来模拟AV对agent未来状态的影响,并做出交互感知预测。具体来说,在将来的每一个时刻,GRU接受上一个时刻的隐藏状态以和最后的预测状态,以及该时刻AV状态的联合输入表示。通过对隐藏状态进行更新来解码agent状态的变化(包括x坐标、y坐标以及偏航角$\theta$,并将该状态信息与上一时刻得状态相加,进而得到当前时刻的预测状态。为了考虑AV对未处于冲突区agent的影响,我们通过引入交互门控网络$\mathbb{G}$ 来建模路口场景下AV与目标agent之间的成对交互关系。
(3)社会感知驾驶风险场:本文构建一种考虑社会偏好的自适应驾驶安全风险场方法。该方法将基于记忆与注意力的全场景表征作为输入,通过考虑基于社会交互的轨迹预测进一步生成适应于周围车辆驾驶员社会偏好的风险场。具体来说,我们首先基于交互式预测模块得到其他车辆多模态轨迹预测,然后结合自车采样轨迹和其他车辆多模态预测轨迹,构建了自适应动态风险场模型。通过所构建的风险场作为自车规划的约束条件。风险场公式如下:
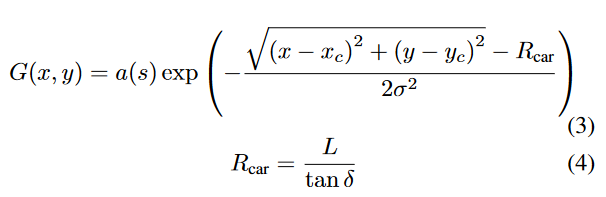
其中,高斯分布的高度a和宽度σ是弧长s的函数;$(x_c,y_c)$为上一时刻车辆旋转中心,$R_\text{car}$是根据车辆轴距L和转向角δ计算出的轨迹预测半径,c是风险场模型在自车当前位置的宽度。$G(x,y)$ 根据每个$(x,y)$处的坐标值,将概率分配给下一步中车辆的可能位置。
(4)基于SADRF的轨迹规划:通过构建基于驾驶员风险场的轨迹规划方法,我们可以将自车周围的风险因素(如其他车辆、行人、障碍物等)映射到一个二维热力图表示的风险场中,并以未来一定时段内的总风险之和作为评价自车轨迹安全性的标准;然后在风险场中搜索最优轨迹。相比于传统的静态风险场方法,我们更加细粒度地对自车轨迹规划的风险进行建模,直观地表示出环境中的风险分布,能够实现更加安全、鲁棒性更强的自车轨迹规划效果。
3.2 实验结果分析
(1)数据集与评价指标:我们在SMARTS模拟器中设计了无保护左转自动驾驶场景,如图2中所示的场景。在无信号无保护左转路口场景中,自动驾驶汽车需要处理交通从不同,并与其他代理协调以安全高效地通过路口。此外,为了证明我们所提方法的优越性,我们还测试了另外三个经典场景:(b)路口并道:自动驾驶车辆在两条或以上道路交叉口处汇合的情况。(c)道路巡航:自动驾驶车辆沿着已知的道路线路行驶,同时遵守交通规则和安全法规。 (d) 车道超车:自动驾驶车辆在行驶过程中从后方超过前方行驶的车辆。此外,我们还采用了成功率、时间、类人性作为评估指标来进行实验结果评估。
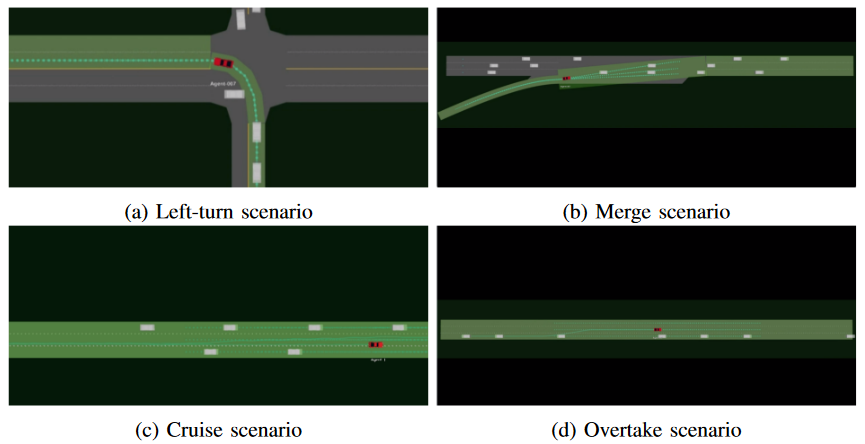
图2 SMART仿真器中涉及的4种驾驶场景
(2)性能分析
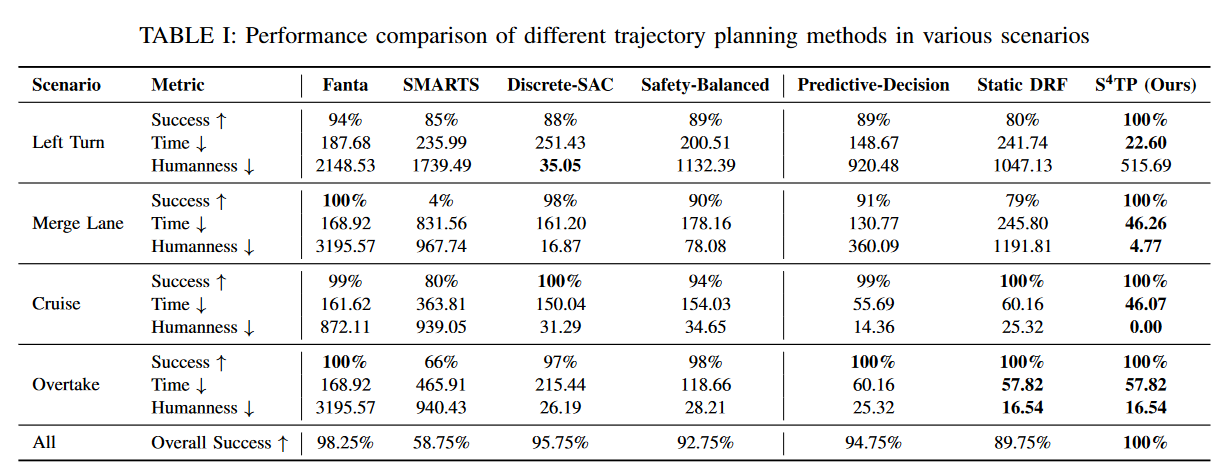
l 定量结果分析:由表1可知,在无保护左转场景下,自动驾驶车辆(AV)需要与来自不同方向的人类驾驶车辆(HDV)进行协调,以安全通过路口。然而,静态DRF方法仅基于历史数据和地理信息进行场景编码,无法考虑驾驶员的实时感知和特定社会偏好,导致不能动态的捕捉到真实驾驶环境中的各种复杂情况和变化,因此成功率较低。SMARTS和Discrete-SAC采用传统强化学习方法,在一定程度上取得了效果,但由于强化学习方法本身的缺点,模型在复杂交互场景下的泛化能力较差。Safety-Balance方法考虑了周围HDV的驾驶风格,并使用基于Transformer的编解码网络来建模车辆之间的交互。虽然该方法侧重于交叉路口场景的交互,在无保护左转场景下表现不错,但对比其他三个场景的效果一般。Fanta方法采用监督学习和强化学习相结合的方式进行训练,并结合传统基于规则的碰撞检测模块进行自车决策规划,因此取得了较好的结果。相比之下,我们的方法在Predictive-Decision的基础上进行改进,在自车的规划阶段引入了SADRF。这使得我们能够动态自适应地对场景中的风险进行建模,并实现对自车周围驾驶风险的准确评估。我们的方法具有更好的可解释性和泛化性,因此在与其他方法的比较中实现了最佳结果。此外,对于其他路口场景,我们的方法在评估指标“time” 和“humanness” 上也分别取得了最优的实验结果,这也充分证明了S4TP能够实现一个更加安全舒适的自动驾驶决策规划。
表1 多种场景下轨迹规划方法实验对比
l 定性结果分析:图2展示了在特定的未保护左转路口场景中,我们的SADRF方法与 Predictive-Decision和静态DRF进行比较的可视化结果。为了更清晰地区分,轨迹规划过程在第3、8、13和18帧进行展示。此外,任何碰撞实例都被强调并清晰标记。其中,Predictive-Decision操作时未添加SADRF,而静态DRF则用静态风险场替换SADRF。如图2(a)所示,静态DRF生成的策略过于保守,在通过路口时导致决策过程明显减慢。此外,在重新启动过程中遇到了重大困难,最终与对向的HDV发生碰撞。同时,图2(b)展示了从第8到第18帧的结果,显而易见的是,在完成轨迹规划后,Predictive Decision在实时调整策略时遇到了困难,当面临侵略性或先前未注意到的车辆(未观察到或被遮挡的车辆)突然出现在驾驶场景中时,导致与人驾驶车辆发生碰撞。 相比之下,如图2 (c) 所示,S4TP在规划之前为车辆分配了预设边际,以预见未预料到的情况。与保守策略不同,S4TP动态地适应实时场景中其他HDV的运动。这可以确保在特定未来时刻避免危险情况,并生成更像人类的驾驶轨迹。值得注意的是,我们的方法结合了一个驾驶风险场模型,使其能够根据实时的道路条件和车辆状态动态调整驾驶风险场。这种自适应能力可以更好地预测和避免潜在的风险和危险,从而产生更具人类特征的指标。定量结果进一步证实了这一创新特性在真实道路场景中提高了我们方法的适应性,为自动驾驶提供了更高级别的安全保障。
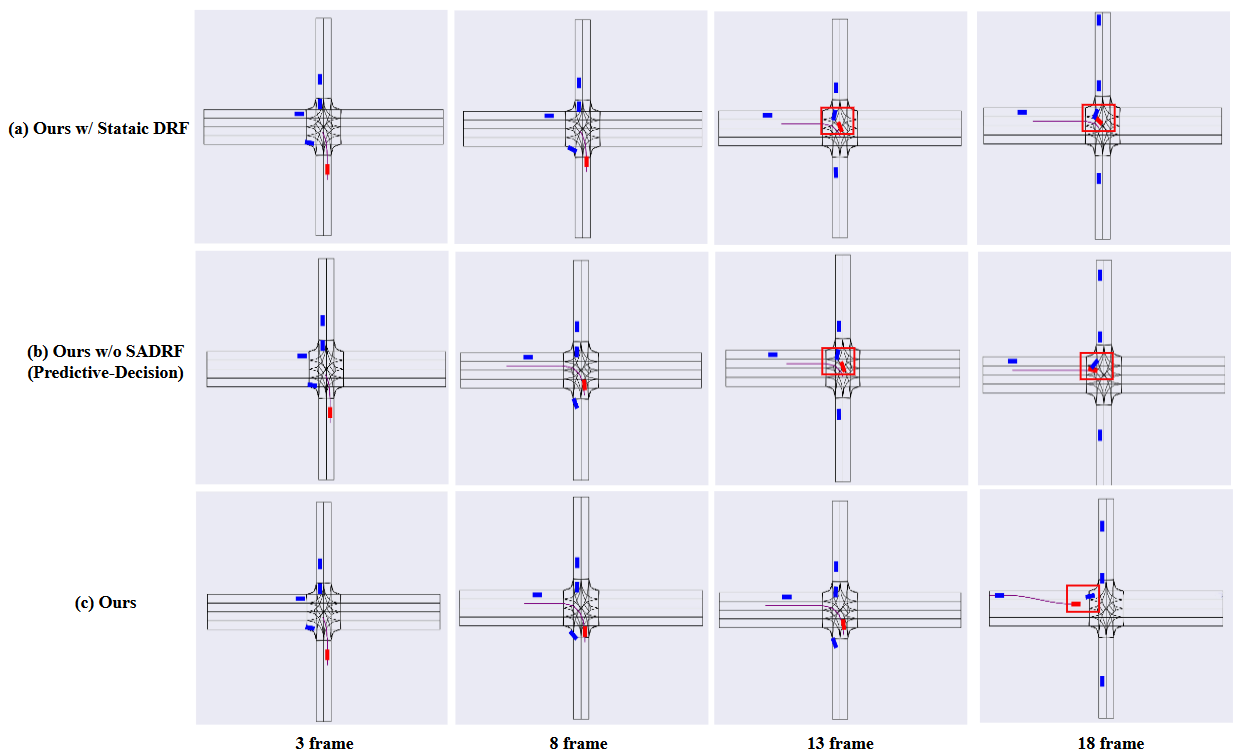
图2场景可视化结果分析
4 总结
本文中,我们提出了一种社交适用且安全敏感的轨迹规划方法,命名为S4TP。该方法考虑了复杂混合交通环境中与社交互动相关的风险,确保了自动驾驶车辆(AVs)的轨迹规划安全、高效且社交适用。所提出的方法采用基于Transformer的编码和解码模块进行场景表示,并使用交互式建模预测周围HDVs的未来轨迹。基于这些预测的多步轨迹,构建了一个SADRF模型,以生成与人类驾驶行为一致的自动驾驶轨迹。我们的方法利用端到端框架中的多任务学习,促进了在模拟驾驶场景中的训练和评估。结果表明,我们的方法优于基准方法。通过SADRF模块,我们实现了比传统的静态DRF模型或忽略社交互动的轨迹规划方法更高的成功率。未来的研究将专注于将风险场模块纳入模型,建立行人-车辆交互关系,准确识别行人位置和运动状态,并实现安全舒适的轨迹规划。
https://m.sciencenet.cn/blog-951291-1437753.html
上一篇:驾驭未来,随车应“变”:一种融入驾驶风格认知的两阶段轨迹规划方法
下一篇:智行千里,预轨先知:一种基于社会力嵌入图神经网络的多智能体轨迹预测方法