博文
平行视觉的基本框架与关键算法
||
引用格式:张慧, 李轩, 王飞跃, “平行视觉的基本框架与关键算法”, 中国图象图形学报, 2021, Vol. 26, No. 1, pp. 82-92. DOI: 10.11834/jig.200400
Citation:Zhang Hui, Li Xuan, Wang Feiyue, “The basic framework and key algorithms of parallel vision”, Journal of Image and Graphics, 2021, Vol. 26, No. 1, pp. 82-92. DOI: 10.11834/jig.200400
平行视觉的基本框架与关键算法
张慧,李轩,王飞跃
摘要:目的 随着计算机与人工智能的快速发展,视觉感知技术突飞猛进。然而,以深度学习为主的视觉感知方法依赖于大规模多样性的数据集,因此,本文提出了基于平行学习的视觉分析框架——平行视觉,它通过大量精细标注的人工图像来给视觉算法补充足够的图像数据,从而将计算机变成计算智能的“实验室”。方法 首先人工图像系统模拟实际图像中可能出现的成像条件,利用系统内部参数自动得到标注信息,获取符合要求的人工图像数据;然后使用预测学习设计视觉感知模型,利用计算实验方法在人工图像系统生成的大量图像数据上进行各种实验,方便地研究复杂环境条件等困难场景对视觉感知模型的影响,使一些实际中的不可控因素转变为可控因素,增加视觉模型的可解释性;最后通过指示学习反馈优化模型参数,利用视觉感知模型在实际场景下存在的困难来指导其在人工场景的训练,以实际与人工虚实互动的方式,在线学习和优化视觉感知模型。由于已经有大量研究人员致力于构建人工场景并生成大量虚拟图像,因此本文采用已构建的这些人工场景图像,并对实际场景图像进行翻转、裁剪、缩放等数据扩充,然后以计算实验和预测学习为重点,开展了相关的应用实例研究。结果 在SYNTHIA(synthetic collection of imagery and annotations),Virtual KITTI(Karlsruhe Institute of Technology and Toyota Technological Institute)和VIPER(visual perception benchmark)数据集上进行的大量实验表明,本文方法能够有效地克服数据集分布差异对模型泛化能力的影响,性能优于同期最好的方法,比如在SYNTHIA数据集上检测和分割性能分别提升了3.8%和2.7%。结论 平行视觉是视觉计算领域的一个重要研究方向,通过与深度学习的结合,将推动越来越多的智能视觉系统发展成熟并走向应用。
关键词:计算机视觉; 平行学习; 平行视觉; 视觉感知模型; 实例分割; 目标检测
The basic framework and key algorithms of parallel vision
Zhang Hui, Li Xuan, Wang Feiyue
Abstract:Objective Computer vision makes the camera and computer the "eyes" of the computer, which can have the abilities of segmentation, classification, recognition, tracking and decision-making. In recent years, computer vision technology has been widely used in intelligent transportation, unmanned driving, robot navigation, intelligent video monitoring, and many other fields. At present, the camera has become the most commonly used sensing equipment in automatic driving and smart cities, generating massive image and video data. We can realize real-time analysis and processing of these data only by relying on computer vision technology. We can detect all kinds of objects in real time and obtain their position and motion states accurately from the image video. However, the actual scene has a very high complexity. Many complex factors interweave together, which poses a great challenge to the visual computing system. At present, computer vision technology is mainly based on the deep learning method through large-scale data-driven mechanisms. Sufficient data are needed due to the heavy dependence of its training algorithm mechanism on datasets. However, collecting and labeling large-scale image data from actual scenes are time-consuming and labor-intensive tasks, and usually, only small-scale and limited diversity of image data can be obtained. For example, Microsoft common objects in context(MS COCO), a popular dataset used for instance segmentation tasks, has a size of about 300 000 and mainly 91 categories. Expressing the complexity of reality and simulate the real situation is difficult. The model trained on the limited dataset will lack practical significance, because the dataset is not large enough to represent the real data distribution and cannot guarantee the effectiveness of practical application. Method The theory of social computing and parallel systems is proposed based on artificial systems, computational experiments, and parallel execution (ACP). The ACP methodology plays an essential role in modeling and control of complex systems. A virtual artificial society is constructed to connect the virtual and the real world through parallel management. On the basis of the existing facts, artificial system is used to model the behavior of complex systems by using advanced computing experiments and then analyze its behavior and interact with reality to obtain a better operating system than reality. To address the bottleneck of deep learning in the field of computer vision, this paper proposes parallel vision, a visual analysis framework based on parallel learning. Parallel vision is an intelligent visual perception framework that is an extension of the ACP methodology into the computer vision field. In the framework of parallel vision, large-scale realistic artificial images can be obtained easily to give support to the vision algorithm with enough well-labeled image data. In this way, the computer can be turned into a "laboratory" of computational intelligence. First, the artificial image system simulates the imaging conditions that may appear in the actual image, uses the internal parameters of the system to automatically obtain the annotation information, and obtains the required artificial images. Then, we use the predictive learning method to design the visual perception model, and then we use the computational experiment method to conduct experiments. Various experiments are conducted on a rich supply of image data generated in the artificial image system. Studying the influence of difficult scenes such as complex environmental conditions on the visual perception model is convenient; thus, some uncontrollable factors in practice can be transformed into controllable factors, and the interpretability of the visual model is increased. Finally, we use prescriptive learning method to optimize model parameters. The difficulty of the visual perception model in the actual scene can be used to guide the model training in the artificial scene. We learn and optimize the visual perception model online through virtual-real interaction. This paper also conducted an application case study to preliminarily demonstrate the effectiveness of the proposed framework. This case can work over synthetic images with accurate annotations and real images without any labels. The virtual-real interaction guides the model to learn useful information from synthetic data while keeping consistent with real data. We first analyze the data distribution discrepancy from a probabilistic perspective and divide it into image-level and instance-level discrepancies. Then, we design two components to align these discrepancies, i.e., global-level alignment and local-level alignment. Furthermore, a consistency alignment component is proposed to encourage the consistency between the global-level and the local-level alignment components. Result We evaluate the proposed approach on the real Cityscapes dataset by adapting from virtual SYNTHIA(synthetic collection of imagery and annotations), Virtual KITTI(Karlsruhe Institute of Technology and Toyota Technological Institute), and VIPER(visual perception benchmark) datasets. Experimental results demonstrate that it achieves significantly better performance than state-of-the-art methods. Conclusion Parallel vision is an important research direction in the field of visual computing. Through combination with deep learning, more and more intelligent vision systems will be developed and applied.
Key words:computer vision; parallel learning; parallel vision; visual perception model; instance segmentation; object detection
0 引言
计算机视觉是让摄像机、电脑这些科技设备成为计算机的“眼睛”,让其可以具有人类的双眼所具有的分割、分类、识别、跟踪和判别决策等功能。近年来,计算机视觉技术广泛应用于智能交通、无人驾驶、机器人导航和智能视频监控等诸多领域(Wiley和Lucas,2018;张慧等,2017; Luo等,2020)。摄像机成为自动驾驶以及智慧城市中最常用的感知设备(Luo等,2018, 2020),可以产生海量的图像视频数据,必须依靠计算机视觉技术才能实现对这些数据的实时分析与处理,从图像视频中实时准确地检测出各类目标,获取它们的位置和运动状态。但是实际场景具有极高的复杂性,许多复杂因素交织在一起,给视觉计算系统带来了严峻考验(Goyette等,2014)。
当前计算机视觉技术主要是以深度学习方法为主,通过大规模数据驱动的机制,挖掘数据中蕴含的潜在规律。由于其训练算法机制对数据集的重度依赖,需要有足够的数据。但是,从实际场景中采集和标注大规模图像数据非常费时耗力,通常只能获得小规模且多样性受限的图像数据集。比如针对实例分割任务的通用数据集MS COCO (Microsoft common objects incontext)(Lin等,2014),样本数在30万左右,主要有91个类别,很难表达出现实的复杂程度。Yuille和Liu(2018)从组合学的角度解释了真实世界图像的“组合爆炸”。
如果没有指数意义上的大数据集,就很难模拟真实情况。而在有限的数据集上训练/测试出来的模型,会缺乏现实意义,因为数据集不够大,代表不了真实的数据分布,无法保证实际应用时的有效性。
中国科学院自动化研究所王飞跃研究员于2004年提出基于ACP(A指人工系统artificial system;C指计算实验computational experiments;P指虚实系统的平行执行parallel execution)方法的社会计算和平行系统理论(王飞跃,2004),构建了一个虚拟的人工社会,以平行管理的方式连接起虚拟和现实两个世界。在对已有事实认识的基础上,利用先进计算手段,借助人工系统对复杂系统的行为进行“实验”,进而对其行为进行分析,虚实交互,得出比“现实”更优的运行系统。
随着平行系统理论不断丰富和完善,其在智能交通(吕宜生等,2019;Zhang等,2018)、智能医疗(王飞跃等,2017)、视觉感知(Wang等,2017;Zhang等,2019)、智慧教育(Wang等,2019)和无人驾驶(刘腾等,2019)等领域取得了良好效果。针对当前深度学习在计算机视觉领域存在的瓶颈,本文提出基于平行学习的视觉分析框架,平行学习由描述学习、预测学习与指示学习构成(李力等,2017),用于解决在复杂场景下存在的标注数据难以获取、人工标注不准确、模型选择和优化依赖技巧等问题。采用已构建的人工图像系统来进行实际数据的扩增和人工图像生成,然后以计算实验与预测学习为重点,使用预测学习方法得到视觉感知模型,并通过指示学习反馈优化模型参数。通过上述平行学习方法,使数据形成闭环,持续不断迭代优化和提升视觉算法的精准度。
1 平行视觉的理论框架与基本方法
为了进一步解决复杂环境中视觉感知模型的科学难题,本文提出如图 1所示的平行视觉分析框架,实现基于实际图像分布的数据扩充和人工场景数据生成,并开展基于数据驱动的计算实验,设计和优化视觉算法。基于实际和人工之间的虚实互动,引入平行学习,持续反馈优化视觉感知模型。
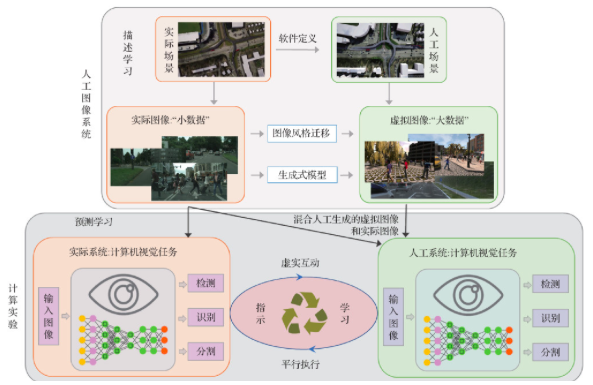
图 1 平行视觉分析框架
Fig. 1 The framework of parallel vision
1.1 人工图像系统
为了解决实际图像多样性不足和标注困难等问题,本文提出构建基于软件定义的人工图像系统。接下来具体说明获取人工图像的基本方法。正是实际数据的手工注释高昂成本激励了人工图像的研发,使用已有开源仿真模拟器或商业游戏引擎(例如:Unity、3DS MAX、OpenGL和Google 3D等)可以完成人工图像的获取。具体来说,人工图像由许多要素构成,通过现场调研、克隆和视频采集等方式收集相关数据,使用3维建模软件以及开源模型资源包,目的在于提高建模精度和速度,做到高效和逼真的建模过程。在完成场景建模后,需要为场景设置虚拟摄像机,模拟实际摄像机物理参数来生成人工图像序列,整个阶段将自动生成精确、多标注的视觉数据,标注图像可以保障视觉算法采用监督的模式进行训练。详细标注包括:目标检测、目标跟踪、语义分割、实例分割、深度信息和光流等。上述工作为有效获取大规模多样性人工图像奠定了基础。此外,研究发现人工图像中具有灵活设置成像条件的潜力,可以改变的成像条件包括(但不限于):1)摄像头位置(角度和高度);2)天气、季节和照明变换等;3)目标物体状态(速度、加速度和运动轨迹等)。
依据所述方法,研究者获取了SYNTHIA(synthetic collection of imagery and annotations)(Ros等,2016)、Virtual KITTI(Karlsruhe Institute of Technology and Toyota Technological Institute)(Gaidon等,2016)和ParallelEye(Li等,2018)等人工图像。研究结果表明人工图像在语义分割、目标跟踪和目标检测等视觉任务上能发挥重要作用。其中,SYNTHIA是在虚拟城市中收集的人工图像集(SYNTHIA-Rand和SYNTHIA-Seqs系列),自动生成语义分割标注。SYNTHIA-Rand是在城市中由虚拟摄像头随机收集的图像,共13 400帧;SYNTHIA-Seqs是城市中产生的连续视频序列,分为4个季节,共200 000帧。Virtual KITTI采用克隆的方式完成人工图像获取,包含多种标注信息和不同成像条件。ParallelEye采用现场调研和开源地图信息获取了北京市中关村地区的路网信息,使用快速建模方式模拟构建了北京城市场景,自动获取ParallelEye数据集。该数据集由40 251帧图像组成,共包含6类标注信息和8种成像条件(包括:雨天、雾天、摄像头角度和光照变化)。人工图像的优势如下: 1)与现有实际图像数据相比,人工图像收集更加高效,生成的标注信息也更加准确;2)人工图像能够轻易地扩大规模和多样性,可以更为全面地对视觉算法进行训练和评估。
1.2 计算智能与预测学习
通过人工图像系统实现数据扩充和数据生成后,进一步研究基于计算实验的视觉感知模型设计与优化方法,从而实现智能视觉感知模型。计算实验是在人工场景的基础上进行的一系列模拟实验。由于资源的有限性以及环境的复杂多变,视觉感知方法很难在各种不同的场景下开展全面有效的实验评估,因此在实际应用中可能发生意想不到的结果。若要增强视觉模型的鲁棒性,必须在复杂多变的环境下进行全面充分的实验。通过利用人工场景来模拟复杂多变的实际环境,在各种各样的人工场景中进行计算实验,来优化和评估视觉算法。该计算实验的核心是预测学习,即用机器给真实环境建模,仿真预测感兴趣的未知信息。
首先,设计更有效的视觉感知模型结构。对于检测、识别和分割,利用预测学习方法设计新的深度学习模型,提高模型的特征表达能力和计算效率,使模型具有更高的精度。当前性能比较好的视觉检测模型有Faster R-CNN(region-convolutional neural network)、RetinaNet和Mask R-CNN等(Zhang等,2020)。Ren等人(2015)提出区域建议网络(region proposal network, RPN),并且把RPN和Fast R-CNN融合到一个统一的网络(称为Faster R-CNN)。Lin等人(2017)提出了一个新的损失函数来解决类别不平衡的问题,该函数通过减少容易分类的样本的权重,使得模型在训练时更专注难分类的样本,从而改善模型的优化方向,并提出新的单阶段检测器RetinaNet来验证该损失函数的有效性。He等人(2017)基于Faster R-CNN架构提出了新的卷积网络Mask R-CNN。它在Faster R-CNN的基础上,延伸出了一个分割分支,能够从单幅图像中同时检测目标边框及像素区域。但是这些模型都是在PASCAL VOC(pattern analysis, statistical modelling and computational learning visual object classes)或MS COCO数据集上进行训练的,其中的图像数据从网络上搜集得到。由于网络空间和实际物理空间并不等价(Torralba和Efros,2011),并且网络空间中存在困难场景样本缺失的问题,因此训练的模型很难直接应用于实际场景。人工图像系统可以仿真模拟各种各样复杂变化的环境条件,比如交通事故图像数据、恶劣天气和低照度条件的图像数据等,从而生成大规模多样性的数据集,作为实际数据集的补充。
然后利用计算实验方法在人工图像系统生成的大量图像数据上进行各种实验,方便地研究复杂环境条件等困难场景对视觉感知模型的影响,大大减少实际中的不可控因素,增加视觉模型的可解释性和鲁棒性。利用人工场景数据集和实际场景数据集联合训练视觉感知模型,提高它在复杂场景下的性能。在进行模型评估时,可以先在人工场景数据集上做实验评估,衡量所提出的视觉感知方法在不同场景下的性能;然后再把基于人工场景数据集优化的模型应用在实际测试集上,并根据实际数据集上存在的性能缺陷来反馈优化视觉模型,最终实现复杂场景下的智能视觉感知与理解。
1.3 基于平行执行的闭环优化
在计算实验的基础上,将视觉模型在实际场景与人工场景中平行执行,通过实际与人工之间的虚实互动,来不断优化提升视觉模型的性能。由于环境的复杂多变性,在实际应用时视觉模型会存在很多困难和挑战,需要在应用过程中不断调节和优化,基于这种虚实互动的平行执行方法来不断优化视觉模型的性能,使其在复杂的场景中能够进行有效的视觉感知与理解。
平行执行的最大特色把实际系统和人工系统紧密地联合在一起,形成一个闭环。在丰富的虚拟对象模型数据的基础上,人工系统可以构建各种有实际意义的场景,其中不仅包含一般实际场景,还包含很多困难场景,困难场景即实际场景中很少发生或很难收集复现的实际场景。通过人工系统和实际系统的交互优化,提升视觉模型的主动感知能力。在平行执行步骤,基于指示学习的思想,通过视觉感知模型在实际场景下存在的困难来指导其在人工场景的训练,以实际与人工虚实互动的方式,在线学习和优化视觉模型,不断提高视觉模型在当前场景中的运行效果,同时为应对未来场景做好充分的准备。
2 基于平行视觉框架的应用实例
在平行视觉框架下,本文提出了基于虚实交互的视觉模型,如图 2所示,用于解决图像标签缺失时的实例分割任务的问题。训练实例分割模型需要大规模多样性的数据集,但是手动标注像素级标签信息非常费时耗力,并且由于图像细节模糊,在低照度条件下人类标注逐像素标签是非常困难的。因此使用由计算机自动生成标注信息的虚拟数据集和未标注的真实图像来完成模型的训练。首先利用人工场景来模拟复杂挑战的实际场景,获取大规模多样性的虚拟数据集,自动生成详细且精确的标注信息。然后将人工“大数据”和实际“小数据”相结合,对视觉模型进行虚实互动的学习与评估。基于这种虚实交互的方法,指导模型更关注实际场景数据和人工场景数据之间的公共特征,从而减少数据分布差异带来的不利影响,有效提升视觉模型的检测和分割效果。

图 2 基于平行视觉框架的实例分割模型概述
Fig. 2 Overview of the proposed model based on parallel perception framework
2.1 基于人工图像系统的数据生成
平行视觉框架的人工图像系统旨在生成大量具有丰富多样性的人工场景图像并对实际场景图像进行扩增。通过生成虚拟图像来弥补实际场景中不充分的图像,从而在减少金钱和人力投资的同时提供精确的标注信息。一种构建虚拟数据集的普遍方法是在游戏引擎(例如Unity3D)中模仿实际场景,SYNTHIA (Ros等,2016)和Virtual KITTI (Gaidon等,2016)都是采用这种方式构建的,在不同的视角、季节、天气和照明条件下提供各种各样的图像并自动生成精确的标注信息。Richter等人(2017)在玩游戏时直接从计算机游戏中收集图像,其中包含从视频游戏中提取的大量帧,以及用于高级和低级视觉任务的准确标签。由于已有大量研究人员致力于构建人工场景并生成大量虚拟图像,因此本文采用已构建的这些人工场景图像,并对实际场景图像进行翻转、裁剪和缩放等数据扩充。
2.2 基于平行视觉的实例分割模型
应用实例使用平行视觉来改进基于区域建议的实例分割模型Mask R-CNN,使其能解决实际场景图像标签缺失时的实例分割任务问题。计算实验步骤包含两个平行的模型,并且两个模型之间的参数彼此共享,如图 3所示。由于实际场景图像没有精确的边界框和像素级标签,因此只能根据输入的人工场景图像计算Mask R-CNN的相关检测和分割损失。训练出的模型很容易在虚拟图像上过拟合,而无法很好地在实际场景中泛化。为了解决这个问题,需要利用实际场景的图像特征来反馈优化视觉模型。来自人工场景和实际场景的图像组成分批的训练数据用于微调所提出的模型。其中人工场景图像用于训练模型以实现准确的检测性能,实际场景图像用于帮助模型专注于人工场景和实际场景之间的公共特征信息。基于指示学习的方法,本文设计了3个新的对齐模块:全局级别对齐模块、局部级别对齐模块和一致性对齐模块。通过这3个对齐模块的共同训练,指导学习到的模型参数更关注于人工场景和实际场景之间的公共特征,从而使得模型获得更好的性能。

图 3 基于平行视觉框架的实例分割模型
Fig. 3 The proposed model based on parallel perception framework
全局级别对齐模块和局部级别对齐模块是两个域分类器,用于判断输入数据是来自于哪个数据域,然后采用对抗的思想训练网络,以致于域分类器不能区分特征是来自于人工场景还是实际场景,使得获得的特征空间是两个域的公共特征。一致性对齐模块用于保证全局和局部级别对齐模块预测结果的一致性。在详细介绍对齐模块之前,首先介绍经典的实现对抗思想的方法——梯度反转层(gradient reverse layer, GRL)。该层在正向过程中保持输入不变,在反向梯度传递过程中将其乘以某个负常数-α来反转梯度的符号。对于全局级别对齐模块,本文使用域分类器来减少两个不同数据域之间的分布差异。GRL层之前的部分类似于对抗网络的生成器,使学习的不变特征对于域分类器而言尽可能地难以区分,保证模型在实际场景中具有良好的泛化能力,GRL层之后的部分类似于对抗网络的判别器,判别图像特征是来自于人工场景还是实际场景。局部级别对齐模块也是使用类似的方式来学习不变的局部区域特征,以便在给定包含目标区域的情况下,无法区分该区域是来自人工场景还是实际场景。一致性对齐方式用于鼓励不同类型的特征表示之间的一致性。
在训练和测试阶段都使用人工系统中的预测模型来输出检测和像素级分割结果,新增的对齐模块仅在训练阶段用于反馈优化视觉模型。具体来说,在训练阶段,优化预测模型的参数来最小化它们在训练数据集上的检测和分割损失,同时优化GRL层之前的特征映射部分的参数来最小化预测模型的损失并最大化GRL层之后的域判别器的损失。
2.3 实验结果与分析
本文使用SYNTHIA(Ros等,2016),Virtual KITTI(Gaidon等,2016)和VIPER(visual perception benchmark)(Richter等,2017)分别作为人工场景数据集,以及Cityscapes(Cordts等,2016)训练集作为训练阶段无标签的实际场景数据集,并用Cityscapes验证集来验证虚实交互的实例分割方法。所有实验使用平均精度(average precision, AP)来评估目标检测和分割的性能,训练阶段使用随机梯度下降来更新模型的参数,其动量为0.9,权重衰减因子为0.000 5,学习率设置为0.000 1,梯度反传因子α设置为0.1。
2.3.1 各个模块的有效性分析
在反馈优化的过程中,本文提出了3个新的对齐模块:全局级别对齐模块、局部级别对齐模块和一致性对齐模块。通过这3个对齐模块的共同训练,指导学习到的模型参数更关注于人工场景和实际场景之间的公共特征,从而使得模型很容易泛化到实际场景中。首先分析了基于平行视觉的实例分割模型中3个对齐模块的有效性,如表 1所示,其中“GLA”表示全局级别对齐方式,“LLA”表示局部级别对齐方式,“CA”表示一致性对齐方式,“/ ”前后的数值表示检测/分割的性能,mAP(mean average precision)为IoU(intersection over union)设置成0.50时计算的所有类别精度的平均值。平行视觉优化前的基准方法检测精度达到30.3%,分割精度达到22.5%。从表 1中可以看出,所有引入不同级别对齐的优化方法都比不使用它的方法表现更好,这证明了所提出的基于平行视觉的实例分割模型的有效性。例如,使用全局级别对齐或局部级别对齐的方法检测精度分别达到32.3%和31.9%。因为虚拟的SYNTHIA与实际的Cityscapes数据集之间存在分布差异,如果不使用任何对齐方式,模型很容易在虚拟图像上过拟合。因此,不同级别的对齐方式在减少数据分布差异方面起着关键作用。当使用所有的对齐模块时,基于平行视觉的实例分割模型可以获得最佳性能,检测精度可以达到34.1%,分割精度达到25.2%,比基准方法分别提高了3.8%和2.7%。
表 1 不同对齐方式的实验结果
Table 1 Experimental results of different-level alignment

2.3.2 各个数据集上的实验结果
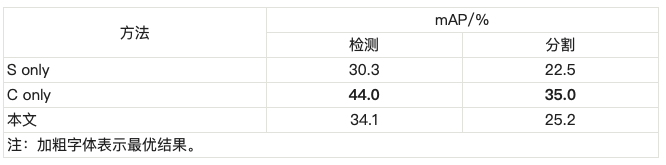
为了对本文方法进行全面评估,在SYNTHIA和Cityscapes上进行了更多实验,如表 2所示。在虚拟的SYNTHIA数据集上训练的实例分割模型(表示为“S only”)无法很好地应用在实际场景中,其总体检测性能从44.0% (如果在真实的Cityscapes数据集上进行训练,表示为“C only”)下降到30.3%。分割性能也存在同样的现象,“C only”模型的mAP为35.0%,而“S only”模型的mAP为22.5%。通过使用本文提出的基于平行视觉的实例分割模型,检测和分割mAP分别达到了34.1%和25.2%,这比“S only”模型分别提高了3.8%和2.7%,缩小了“S only”和“C only”模型之间的性能差距。
表 2 SYNTHIA和Cityscapes数据集的实验结果
Table 2 The results on SYNTHIA and Cityscapes
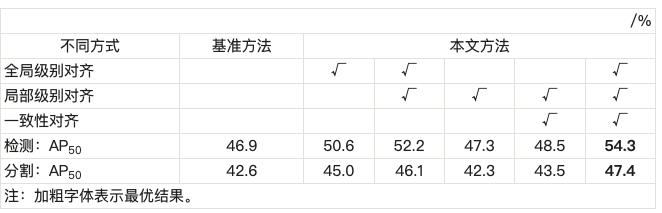
在Virtual KITTI和Cityscapes上的实验结果如表 3所示。基准模型Mask R-CNN对于汽车进行检测和分割的AP50(IoU为0.5时得到的平均精度)分别为46.9%和42.6%。具有全局级别对齐的方法将AP50分别提高了3.7%和2.4%。当进一步增加局部级别对齐时,本文方法将AP50分别提高了5.3%和3.5%。使用所有对齐模块的方式可以获得最佳的性能,在实例分割任务上的AP50达到47.4%,比平行视觉优化前的基准方法高4.8%。在目标检测任务上,比基准方法提高了7.4%。
表 3 Virtual KITTI和Cityscapes数据集的实验结果
Table 3 The results on Virtual KITTI and Cityscapes
为了进一步验证基于平行视觉的实例分割模型的有效性和鲁棒性,本文使用VIPER数据集进行了实验,如表 4所示。在检测和分割任务中,基准方法的mAP分别为31.3%和26.5%。使用全局级别对齐的方法分别达到了32.0%和26.9%。当进一步使用局部级别对齐时,本文方法分别达到了33.6%和27.4%。这表明本文方法可以有效地减少不同层次的数据分布差异。当全局级别对齐、局部级别对齐和一致性对齐一起使用时,mAP分别提升至34.1%和29.2%,比基准方法分别提高了2.8%和2.7%。这些结果表明,基于平行视觉的实例分割模型可以显著提升模型的检测和分割性能。
表 4 VIPER和Cityscapes数据集的实验结果
Table 4 The results on VIPER and Cityscapes

进一步将本文方法与最新的弱监督和领域适应方法进行了比较,如表 5所示。所有方法均使用虚拟的SYNTHIA数据集,除了Weakly-Sup(Saleh等,2017)不使用虚拟图像,Saleh等人(2018)使用GTA5(Grand Theft Auto V)作为背景类,VEIS(virtual environment for instance segmentation)作为前景。Weakly-Sup(Saleh等,2017)依赖于使用真实图像的类别标签,相比之下,本文方法可以处理不包含任何真实图像标注信息的场景,借助不同级别的对齐优化方法来获得更好的分割性能。ROAD-Net(Chen等,2018)通过使用目标导向的蒸馏模块和空间感知的适应模块来解决显著的分布差异,本文方法从特征层面应用不同的对齐方法,实现了8.3%的提升。Saleh等人(2018)将Mask R-CNN产生的前景掩膜与DeepLab语义分割网络产生的逐像素预测相结合,达到了36.1%的mIoU(mean IoU),比本文方法低1.2%。
表 5 与域自适应和弱监督方法的比较
Table 5 Comparison with domain adaptation and weakly-supervised methods

3 思考与展望
3.1 模型可解释性
自2012年以来,计算机视觉领域不断涌现出很多激动人心的研究成果,例如,人脸识别、目标识别与分类等方面的性能已接近甚至超过人类视觉系统,这主要得益于深度学习技术的发展。但是,将深度学习模型应用于视觉任务时还缺乏足够的理论支撑,学习到的模型可解释性较弱。本文提出了基于平行学习的视觉分析框架,通过人工图像系统构建的人工场景来模拟外界的动态变化信息,并评估其对视觉模型参数的影响,尽管它可以在一定程度上增加模型的可解释性,但是仍然具有局限性,对于如何选择模型、如何确定模型的深度以及深度学习的本质等基本问题还没有给出很好的解释。该问题在智能交通场景下的自动驾驶尤为突出,基于深度学习的视觉模型难以理解其中依据,存在安全隐患,尤其是发生事故后的责任限定。而且,加上了对抗扰动的输入可以误导自动驾驶汽车的感知系统,使其在分类道路标志时出错,从而可能造成灾难性的后果。例如腾讯科恩安全实验室发现:在道路特定位置贴上几个贴纸,可以让处在自动驾驶模式的汽车并入反向车道。因此,必须进一步完善深度学习理论,为设计模型结构、加速模型训练、提高模型性能、因果关系以及可解释性等提供指导。
3.2 动态平行视觉
当前计算机视觉的很多工作主要关注静态场景,比较缺乏对动态场景的处理, 例如人脸识别大部分也是基于静态场景来展开研究的。尽管动态目标的跟踪、检测、分析、行为的识别与理解等相关工作也在研究,但并没有考虑整个场景的动态特性,还没有上升到一个系统化的水平。基于动态场景的视觉任务是基于静态图像的视觉任务的直接扩展,本文提出的平行视觉分析框架可以推广应用于动态视觉。动态视觉存在的很大问题是视频图像的采集困难。视频图像一般是在户外(或室内,但是采集条件比较差)获取的,通常没有用户的配合,所以视频图像经常会有很大的光照、姿态变化,还会有各种各样的遮挡和模糊等,导致视频图像质量不高。平行视觉分析框架的人工图像系统可以利用人工场景模拟复杂挑战的实际环境,提供大量质量较高的视频数据,作为实际视频图像的补充。
3.3 多源视觉任务
智能车辆的车载传感器通常由摄像机、激光雷达和GPS等组成。摄像机能够感知来自周围世界的颜色和纹理信息,然而,它们的探测范围有限,在有限的光照或恶劣的天气条件下表现不佳;激光雷达提供精确的距离信息,并且能够探测到小物体,它在夜间也能很好地工作,但不提供颜色信息。因此,基于这些多源数据的平行视觉能够提高视觉模型的鲁棒性与准确性。
4 结论
本文介绍了平行视觉的基本思想,并提出基于平行学习的视觉分析框架,首先使用描述学习解决人工图像生成和扩增,然后使用预测学习解决视觉感知模型的选择、设计和优化,并通过指示学习进行虚实交互,反馈优化模型参数。通过上述平行学习方法,使数据形成闭环,持续不断迭代优化和提升视觉算法的准确率。本文概述系统理论框架部分已有相关工作,并通过对已有工作调研分析给出具体思考与该领域未来研究展望。需要指出的是,本文的应用实例研究还处于初步验证阶段,在视觉计算领域的平行视觉理论还需要进一步发展和普及,有待更完备的理论、算法和软件平台的建立和使用,需要更多的研究和工程人员的关注,并实际应用于视觉计算的各个领域。
参考文献:
https://m.sciencenet.cn/blog-2374-1281878.html
上一篇:[转载]IEEE TCSS 第8卷2期网刊已发布, 敬请关注!
下一篇:[转载]【当期目录】IEEE/CAA JAS 第8卷 第4期