博文
IJMSD | 南京理工大学王庆涛副教授、加拿大约克大学李刚强博士等:基于绝对节点坐标法的环形空间系绳运输系统动力学建模
||
图 文 导 读
在过去几十年研究与探索中,空间系绳运输系统(tether transportation system, TTS)被认为在大规模远程低成本运输方面具有较大优势。空间系绳运输系统是由一个或两个灵活性较强的柔性系绳组成,系绳末端连接卫星并通过几个运输装置沿它们运输有效载荷。
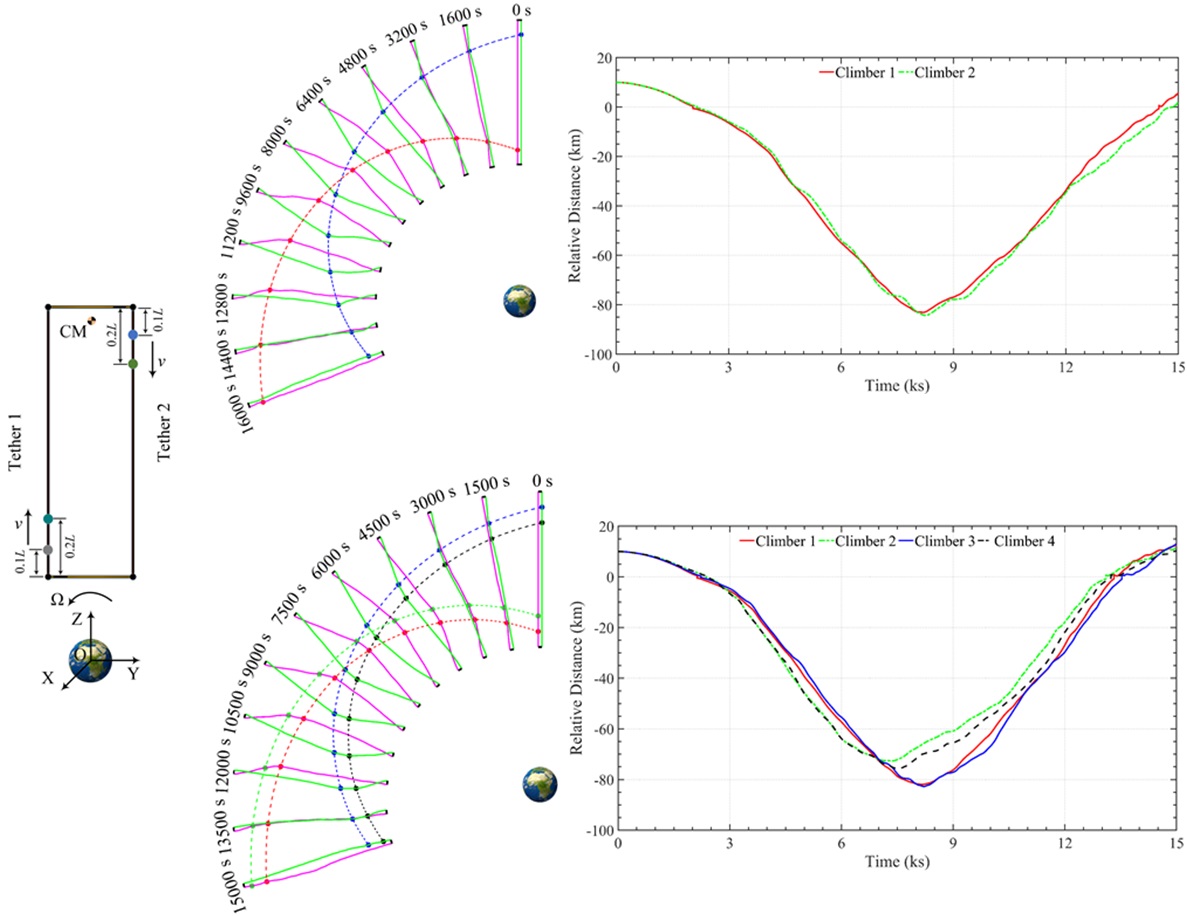
南京理工大学王庆涛副教授和张智勇副教授团队、上海宇航系统工程研究所刘振东工程师、南京航空航天大学徐世东讲师和加拿大约克大学李刚强研究员共同在《国际机械系统动力学学报(英文)》(International Journal of Mechanical System Dynamics, IJMSD)发表了“基于绝对节点坐标法的环形空间系绳运输系统动力学建模与分析”研究论文。该文提出了一种环形空间系绳运输系统(looped TTS, L-TTS)的高保真模型,并研究该系统的大变形和较大的整体运动。文章采用基于绝对节点坐标法(absolute nodal coordinate formulation, ANCF)的细梁单元离散了两个系绳并建立了系统的精确模型,简要介绍了与系绳纵向和弯曲变形相关的非线性弹性力及其雅可比矩阵,采用基于ANCF的滑动铰模型描述了系绳和运输装置之间的相互作用。在系统运作时,由于科氏力的作用,运输装置与系绳之间存在碰撞风险。为了降低这些风险,该文研究了两种振动抑制策略,即运输装置相对于系绳做减速运动和每个系绳上放置多个运输装置。最后,该文通过仿真验证了两种策略在降低运输装置与系绳碰撞风险、L-TTS的整体振动以及系绳纵向弹性力大小方面的有效性,并且验证了该文提出的高保真模型在微重力条件下的良好性能。该研究结果为未来空间运输系统的建设提供了借鉴。
A high-fidelity multibody-system dynamic model of the looped tether transportation system (L-TTS) is proposed in this study to study its large deformation as well as large overall motion. The absolute nodal coordinate formulation (ANCF)-based gradient-deficient beam element is employed to establish the accurate model of the two flexible tethers subject to large deformations. The relative movement of climbers along tethers is described by using the sliding joint model based on ANCF. To reduce the collision risks between tethers and climbers, two libration suppression strategies, namely, the decelerated motion of climbers relative to tethers and multiple climbers per tether are investigated in this study. Several numerical simulations not only validate the effectiveness of the two strategies in reducing the collision risks between climbers and tethers, the overall librations of L-TTS, and the magnitudes of the longitudinal elastic force of tethers, but also verify the good performance of the high-fidelity model proposed in this study for dynamic simulation of the L-TTS in microgravity conditions. Keywords: looped tether transportation system, high‐fidelity model, absolute nodal coordinateformulation, sliding joints, libration suppression DOI: 10.1002/msd2.12044 Share this article: https://onlinelibrary.wiley.com/doi/10.1002/msd2.12044 Cite this article: Yang J, Wang Q, Zhang Z, Liu Z, Xu S, Li G. Dynamic modeling and analysis of the looped space tether transportation system based on ANCF. Int J Mech Syst Dyn. 2022;2(3):204-213. 该文亮点: 期 刊 简 介 IJMSD由来自18个国家的20位院士、17位国际学会主席、20位国际期刊主编等69位科学家和国际出版巨头美国Wiley出版社合作创立。主编为南京理工大学芮筱亭院士,3位合作主编分别是加拿大皇家学会会士、加拿大工程院院士、欧洲科学院院士、加拿大麦吉尔大学Marco Amabili院士,国际理论与应用力学联盟(IUTAM)前司库、国际多体系统动力学协会(IMSD)前主席、德国斯图加特大学Peter Eberhard教授和美国工程院及科学院两院院士、欧洲科学院外籍院士、中国科学院外籍院士、美国工程科学协会前主席、美国西北大学Yonggang Huang院士。 IJMSD旨在用机械系统动力学科学与技术为现代装备设计、制造、试验、评估和使用全生命周期性能的提升提供先进的理论、软件、方法、器件、标准,为全球科学家和工程专家提供广泛的机械系统动力学国际交流平台。IJMSD强调从“系统”视角及系统级工具理解动力学,所涉及的机械系统不仅包括各种不同尺度的机械系统和结构,还包括具有多物理场/多学科特征的综合机械系统。 目前,IJMSD已被ESCl, Scopus, Inspec, DOAJ等收录。2023年免收出版费,并为已录用稿件免费提供专业语言润色服务,欢迎全球科学家投稿交流。 期刊主页: https://onlinelibrary.wiley.com/journal/27671402 投稿网址: https://mc.manuscriptcentral.com/ijmsd 编辑部邮箱:office@ijmsd.net 长按下图,扫码添加小编微信,邀请您进入IJMSD读者交流群,群内不定期分享期刊论文,并开展学术写作讲座等各项活动。 备注“姓名-单位-IJMSD读者” 请长按二维码 关注IJMSD
作 者 简 介 杨 杰 南京理工大学理学院多体系统动力学硕士研究生,研究方向为空间系绳运输系统动力学和多星分离动力学。
杨 杰 南京理工大学理学院多体系统动力学硕士研究生,研究方向为空间系绳运输系统动力学和多星分离动力学。 王庆涛 南京理工大学力学与工程科学系副教授,于2008、2010和2016年在南京航空航天大学分别获学士、硕士和博士学位。研究方向为多体系统动力学、空间系绳运输系统、航天器动力学和卫星分离动力学。
王庆涛 南京理工大学力学与工程科学系副教授,于2008、2010和2016年在南京航空航天大学分别获学士、硕士和博士学位。研究方向为多体系统动力学、空间系绳运输系统、航天器动力学和卫星分离动力学。 张智勇 南京理工大学力学与工程科学系副教授。于 2007 和2015 年在哈尔滨工业大学获学士和博士学位。研究方向为旋转机械和特种车辆的振动控制。
张智勇 南京理工大学力学与工程科学系副教授。于 2007 和2015 年在哈尔滨工业大学获学士和博士学位。研究方向为旋转机械和特种车辆的振动控制。 刘振东 上海航天系统工程研究所运载火箭设计系统工程师。于2012年在南京航空航天大学获硕士学位,曾参与多个中国著名运载火箭开发项目。
刘振东 上海航天系统工程研究所运载火箭设计系统工程师。于2012年在南京航空航天大学获硕士学位,曾参与多个中国著名运载火箭开发项目。 徐世东 南京航空航天大学航空学院讲师。于2012年在东北林业大学获自动化专业学士学位,于2014年和2018年在哈尔滨工业大学获控制科学与工程硕士和博士学位。研究方向为空间系绳系统、航天器、在轨自主组装和空间机器人。
徐世东 南京航空航天大学航空学院讲师。于2012年在东北林业大学获自动化专业学士学位,于2014年和2018年在哈尔滨工业大学获控制科学与工程硕士和博士学位。研究方向为空间系绳系统、航天器、在轨自主组装和空间机器人。 李刚强 2019—2020年在约克大学机械工程系从事博士后研究;2021年起担任曼彻斯特大学机械、航空航天和土木工程系研究助理;于2007和2010年分获约克大学海军建筑和海洋工程学士和硕士学位,2019年获约克大学地球与空间科学博士学位。
李刚强 2019—2020年在约克大学机械工程系从事博士后研究;2021年起担任曼彻斯特大学机械、航空航天和土木工程系研究助理;于2007和2010年分获约克大学海军建筑和海洋工程学士和硕士学位,2019年获约克大学地球与空间科学博士学位。



https://m.sciencenet.cn/blog-3296863-1400732.html
上一篇:圣地亚哥州立大学LS Yousuf:Lyapunov指数、功率谱分析和Poincaré图的凸轮从动件系统接触力非线性动力
下一篇:IJMSD | 同济大学吴光强教授团队:双质量飞轮的参数影响规律分析及优化设计
全部作者的其他最新博文
- • IJMSD | 浙江工业大学金江明副教授:构建不对称强非线性结构声系统实现声能量非互易传递
- • IJMSD封面文章 | 青岛大学丁洁玉教授团队:基于多尺度微分代数神经网络的动力系统学习方法
- • IJMSD | 南京航空航天大学裘进浩教授团队:双向能量调节的压电分流阻尼技术及其对结构振动的抑制性能研究
- • IJMSD | 苏州大学凌明祥教授、华南理工大学张宪民教授,等:含曲轴柔性铰链的串并联柔顺机构传递矩阵建模方法
- • IJMSD Themed Collection | Vibration and Control (2022—2023)
- • IJMSD | 中国石油大学(华东)赵德敏副教授团队:温度对双层氮化硼拉伸和振动性能的影响