博文
分布参数系统的平行控制: 从基于模型的控制到数据驱动的智能控制
||
分布参数系统的平行控制: 从基于模型的控制到
数据驱动的智能控制
刘志杰, 欧阳云呈, 宋宇拌, 贺 威, 王飞跃
【摘 要】 简述了分布参数系统的控制发展与现状, 分析了现有分布参数系统控制方法的局限性. 随着时代的发展, 社会因素逐 渐成为构建系统的一个必不可少的参数. 针对日益复杂的分布参数系统, 其精确模型的建立变得日益艰难. 在网络迅速发展的 前提下, 以大数据与云计算等技术为背景, 基于先进的大型计算的控制理论和方法, 将平行控制的控制思想引入到了分布参数 系统的控制中. 平行控制是通过虚实互动的执行方式来完成控制任务的一种方法, 其核心是通过人工社会或人工系统对复杂分 布参数系统进行建模, 利用计算实验进行分析和评估, 最后通过平行执行的方式对分布参数系统实行控制和管理. 这一种方法 结合了数据驱动控制和计算控制, 是一个适应时代快速发展的控制思路.
【关键词】 平行控制, 分布参数系统, 人工系统, 数据驱动
引用格式 刘志杰, 欧阳云呈, 宋宇骋, 贺戚, 王飞跃. 分布参数系统的平行控制: 从基于模型的控制到数据驱动的智能控制 [J]. 指挥与控制学报, 2017, 3(3): 77−185
Parallel Control of Distributed Parameter Systems: From Model Based Control to Data Driven Intelligent Control
LIU Zhi-Jie, OUYANG Yun-Cheng, SONG Yu-Hua, HE Wei, WANG Fei-Yue
【摘 要】 简述了分布参数系统的控制发展与现状, 分析了现有分布参数系统控制方法的局限性. 随着时代的发展, 社会因素逐 渐成为构建系统的一个必不可少的参数. 针对日益复杂的分布参数系统, 其精确模型的建立变得日益艰难. 在网络迅速发展的 前提下, 以大数据与云计算等技术为背景, 基于先进的大型计算的控制理论和方法, 将平行控制的控制思想引入到了分布参数 系统的控制中. 平行控制是通过虚实互动的执行方式来完成控制任务的一种方法, 其核心是通过人工社会或人工系统对复杂分 布参数系统进行建模, 利用计算实验进行分析和评估, 最后通过平行执行的方式对分布参数系统实行控制和管理. 这一种方法 结合了数据驱动控制和计算控制, 是一个适应时代快速发展的控制思路.
【关键词】 平行控制, 分布参数系统, 人工系统, 数据驱动
引用格式 刘志杰, 欧阳云呈, 宋宇骋, 贺戚, 王飞跃. 分布参数系统的平行控制: 从基于模型的控制到数据驱动的智能控制 [J]. 指挥与控制学报, 2017, 3(3): 77−185
Parallel Control of Distributed Parameter Systems: From Model Based Control to Data Driven Intelligent Control
LIU Zhi-Jie, OUYANG Yun-Cheng, SONG Yu-Hua, HE Wei, WANG Fei-Yue
Abstract This paper introduces the development and current situation of distributed parameter system control, and analyzes the lim- itations of existing control methods. With the increase in control requirements, social factors need to be considered, which increases the difficulty of modeling and control. In the premise of the rapid development of the network, with big data and cloud computing technology as the background, based on the control theory and method of large scale calculation, the parallel control is introduced into the control of distributed parameter system. Parallel control is a method of performing tasks through interaction between the virtual and the real. The core is to model the complex distributed parameter system through artificial system, analyze and evaluate it by using the computational experiment, and finally implement the control and management of the distributed parameter system by parallel execution. This method combines data-driven control and computational control, and adapts to the rapid development of society.
Key words parallel control, distributed parameter system, artificial system, data-driven
Citation LIU Zhi-Jie, OUYANG Yun-Cheng, SONG Yu-Hua, HE Wei, WANG Fei-Yue. Parallel control of distributed parameter systems: from model based control to data driven intelligent control[J]. Journal of Command and Control, 2017, 3(3): 177−185
1954 年, 钱学森出版了《工程控制论)[1], 书中 讨论了热传导过程的分布参数系统问题, 最早使用 了无穷阶传递函数的概念, 这是对分布参数系统研 究的奠基性著作. 从 20 世纪 60 年代开始, 现代偏微 分方程和泛函分析理论成果的应用, 为分布参数系统建立了严格的理论基础, 提供了有力的研究工具. 1961 年, Butkovskii 等人在文献 [2] 中讨论了对分布 参数系统的最优控制方法. 之后, 王耿介研究了分布 参数系统的稳定性、能控性、能观测性、最优控制等 问题[3]. 1971 年, Lions 在文献 [4] 中使用泛函分析的 方法, 通过变分不等式研究了各类典型的二阶偏微 分方程的二次性能指标的最优控制问题, 为用偏微 分方程研究分布参数系统提供了方法. 1978 年, Ray 在文献 [5] 中对之前分布参数系统的应用进行了广 泛的介绍. 郭宝珠在文献 [6] 中对分布参数系统控制 问题、方法以及研究进展进行了详细地分析.
从本质上来看, 现实世界的所有物理系统或过程都具有分布特征, 其能量或质量在时间上连续变化, 在空间上广泛分布. 通常这些系统或过程称为分布参数系统, 例如, 柔性体的振动过程、电磁场、化工过程、多智能体系统等. 下面我们给出3 个实例来说明他们的应用.
柔性体结构: 与传统的刚性结构系统相比, 柔性结构系统克服了灵活性低、耗能较大、操作速度较慢和操作空间有限等缺点, 具有材质较轻、灵活性强、低耗能、较好的能量效率和较高的运行速度等优点, 在生物、化工、医学和航空航天领域有着越来越多的应用, 比如柔性机械臂[79]、海洋输油管[10]、空中加油管[11]、扑翼飞行器[1213] 和桥梁建筑等. 然而, 柔性结构系统相比于刚结构系统, 有着十分复杂的动力学特征和难以控制的振动特性, 需要基于偏微分方程的分布参数系统来描述[14] 以及基于常微分方程的分布参数系统[15].
化工过程: 化工领域的许多工业过程都是分布参数系统. 常见的有各种活塞流反应器(Plug Flow Reactor, PFR)、催化反应过程等. PFR 也是水处理过程的常见形式(如推流式曝气池、沉降池等). PFR 的化学反应过程和催化反应棒的温度分布等表现出很强的空间分布特性, 是典型的分布参数系统.
多智能体系统: 在过去的几十年中, 越来越多的工业、军事等领域需要个体之间的协同合作, 即通过个体之间的相互协调配合, 完成复杂、艰巨或者高精度的任务, 而且能够提高系统的可靠性. 基于以上需求, 多智能体在电力系统、多机器人、多无人机、交通运输等领域有了越来越广泛的研究. 从数学角度来说, 多智能体系统实际上是一个复杂的分布参数系统, 基于此模型才能够更好地研究各种协同控制功能并实现复杂的任务.
此外, 还有社会经济、生物医学等复杂的分布参数系统开始引起了研究人员的注意. 这些复杂的分布参数系统有时称为无穷维系统, 无论在系统的建模还是控制研究都存在着极大的挑战, 因而这一方向受到越来越多的关注.
传统的许多控制策略不能直接用于解决分布参数系统的控制问题. 目前, 应用比较广泛的基于分布参数系统的控制方法主要有以下3 种: 基于截断模型的模态控制, 分布式控制和边界控制.
基于截断模型的模态控制方法实际上是属于“先降阶后设计” 的方法, 一般的降阶方法是有限元法、Galerkin’s 法和假设模态法. 这3 种方法虽然简化了控制系统的设计和分析, 但是忽略柔性系统的高阶模态可能造成实际系统的不稳定, 也就是溢出问题. 文献[1619] 研究了当截断模型的控制器设计基于很少的模态时, 会造成溢出问题也就是会使系统不稳定. 为了获得更精确的控制性能, 需要更高的柔性模态, 从而会使控制器的阶数增高.
这造成了实际控制系统设计实施的难度. 为了克服基于截断模型的模态控制的缺点, 提出一种基于 PDE 模型设计的边界控制策略, 根据 控制的具体实施方法可划分为 PID 控制、鲁棒控制[20−21] 、自适应控制[22−23] 、滑模控制[24] 、迭代学习控制[25] 、神经网络控制[26−27] 、模糊逻辑控制[28] 、最 优控制[29] 等. 鲁棒控制、自适应控制、变结构控制、 神经网络控制、模糊逻辑控制或最优控制都是基于 模型或者模型结构己知条件下的控制策略. 虽然 PID 不需要系统的模型, 但它对非线性系统控制的不足 使得其在分布参数系统中的控制效果不佳.
随着社会的发展, 系统的集成度不断提高, 影响 系统控制的参数也不断增多, 导致系统控制的复杂 程度也不断增高; 而许多分布参数系统的控制, 社会 与人的因素被引入到了系统的控制中, 由于社会与 人的因素的复杂性是无法通过模型来预知的, 对于 包含其参数的分布参数系统的控制, 通过基于模型 的控制己很难满足复杂分布参数系统的控制要求. 在这个网络技术迅速发展的时代, 分布参数系统的 控制也要跟上时代的步伐. 对于有不同需求、多功 能的复杂的分布参数系统, 其相关的海量的网络数 据, 以及大数据, 云计算等技术的迅速发展, 为基于 先进的大型计算的控制方法的提出提供了前提与基础, 这也是分布参数系统的控制在新社会, 新技术下 的可行的发展方向.
因此, 我们提出使用基于 ACP 的平行控制方 法[30−32] 解决复杂的分布参数系统所面临的问题. 即 将平行控制理论与分布参数系统结合, 联通物理、网络和社会空间, 利用计算实验进行分析和评估, 通过 平行执行的方式对分布参数系统实行控制和管理.
1 现有的分布参数系统控制方法的局限性
由于日益复杂的控制要求以及某些社会与人的因素引入到了分布参数系统的控制中, 其控制的难度在不断地加深, 这给研究者带来了很多难题, 总结如下:
1.1 模型构建的准确性
目前, 关于分布参数系统的研究大多是基于准 确的模型或者模型可预测的情况. 现有的建模方法, 比如假设模态法[7], 是将柔性机械臂分布参数系统转 化为了 ODE 系统来处理. 这种控制的精确性是建立 在假设模态法趋近真实系统的准确性上, 而当柔性 机械臂的控制需求增加, 外来干扰与交互增加, 通过 假设模态法所建模型, 很难趋近真实的分布参数系 统. 而且由于当今控制系统的集成度日益提高以及 社会与人的因素逐渐成为了影响系统状态的参数, 参数的复杂性太高导致了建模难度的急剧增加, 就 会出现无法建模或者所建模型不精确的问题, 此种 情况下, 无法通过基于模型设计的控制器对实际系 统实现有效的控制. 例如在文献 [33] 中, 针对移动梁 系统, 作者设计了一种基于 PDE 模型的控制器, 其中 没有考虑到实际过程中人的自主操作元素, 而随着 控制需求的增多, 在控制例如梁的分布参数系统时, 需要考虑到更多的元素, 这就增加了建模的难度, 使 得模型的准确性很难得到保证. 基于模型而设计的 控制器也很难达到良好的控制效果.
1.2 计算量
由于分布参数系统趋于复杂化, 其控制参数也 变得多元化, 包括社会和人的因素, 其计算量明显增 大, 不结合当今流行的大数据, 云计算等先进技术, 其实时控制性能将无法满足控制需求. 例如在文献 [13] 中, 对于飞行机器人的柔性翅膀, 作者基于 PDE 模型设计了相应的控制器, 而由于 PDE 模型是一种 无限维的模型, 其计算量较大, 并且当考虑到实际飞行环境中的多种干扰以及飞行障碍, 能源节约等因 素, 其计算量会更加庞大, 严重影响实时控制的性能, 不利于精确控制的实现.
以上这些问题正是复杂的分布参数系统所面临 的不确定性、多样性和复杂性问题 (UDC).
2 平行的思想
平行控制的 “平行”, 是指虚实之间的平行互动, 这是一个相互影响的过程, 是指实际物理过程和人工计算过程之间的平行交互. 平行控制的平行主要 是指将实际问题扩充之后得到了一个虚空间, 通过虚实互动来完成控制问题的一种方式, 是在大数据 和数据驱动的基础上, 迈向计算控制科学与工程的 一种智能化方法与技术途径.
分布参数系统的控制是当今一个复杂性的科学问题, 而由于系统参数的不可描述或者不可预测性, 其研究必须跳出传统的科学观念. 传统的科学最初是牛顿体系, 是确定性的, 随后的量子力学是关于概率学的科学, 而复杂的分布参数系统是关于可能性 的科学, 因此必须考虑 “默顿系统” 及其相应的 “默 顿定律” 特性. 就如虚数的提出, 对于复杂的分布参数系统, 要使得其有 “解”, 必须引入对应于分布参数系统的 “虚数”, 即虚空间. 而物理空间或者实空间和虚空间构成了复杂空间, 通过复杂空间实现平行控制. 而对分布参数系统的虚空间的构造, 是一个研究上的挑战. 平行控制是基于 ACP 方法, ACP[32] 是指 人工社会, 计算实验, 平行执行的有机组合.
ACP 方法是将人工搭建的虚拟空间变成我们解决复杂问题的新的另一半空间, 结合实际的物理空间一起构成求解 “复杂系统方程” 之完整的 “复杂空 间”. 而 ACP 方法的核心技术支撑则是新兴的 “云计 算”, “物联网”, “大数据” 等相关技术. 总结来说 ACP 的控制室思路主要分为 3 步: 第 1 步, 利用人工社会 或人工系统对复杂系统进行建模, 一定意义下, 就是 用类似计算机技术来建模. 第 2 步, 利用计算实验对 复杂系统进行分析和评估. 一旦有了针对性的人工 社会, 我们就可以把人的行为、社会的行为放到计算 机里面, 把计算机变成一个实验室, 进行 “计算实验”, 通过 “实验” 来分析复杂系统的行为, 评估其可能的 后果. 第 3 步, 将实际社会与人工社会并举, 通过实际 与人工之间的虚实互动, 以平行执行的方式对复杂 系统的运行进行有效的控制和管理.
当今的复杂控制系统, 由于系统的控制参数量明显增多, 特别是社会和人的因素的加入, 使得在控制时需要的数据量急剧增大, 这就要求控制要从小数据的时代跨越到大数据时代的洪流中. 而平行控制就是适应时代的发展, 在计算实验中, 需要海量的数据作为支撑, 去计算与评估.
3 分布参数系统的平行控制
分布参数系统的控制方法, 在其基本框架下主 要有 3 种工作模式, 学习与培训, 实验与评估, 控制与 管理. 平行控制系统中, 实际系统为所需控制的实际 的复杂分布参数系统, 而人工系统或虚拟系统需要 根据实际系统的控制要求来建立, 实际的分布参数 系统可以同时地或分时地与多种人工系统进行平行交互. 对于复杂分布参数系统而言, 人工系统的建立是一个难题, 因为人工系统的建立涉及到控制的需求与目标. 在实验与评估中, 分布参数系统的虚实交互, 交互信号的选择是一个需要考虑的问题, 评估的方法也是一个需要考虑的问题. 对于复杂的分布参数系统, 特别是包含自主行为元素的分布参数系统, 无法建立逼近实际系统的模型, 因此只能利用独立的人工系统, 通过与实际系统的实时交互, 达到相互趋近的效果, 而往往是以实际系统逼近人工系统为目标, 这也是需要考虑的问题. 对于控制和管理, 与平行执行为主, 在虚实实时交互的基础上, 根据计算实验的评估结果, 对实际的系统施加合适的控制. 而在实验评估中, 数据是计算实验的基础, 海量数据的支撑是解决问题的前提. 分布参数系统的平行控制的基本框架如图 1 所示:
将平行系统的平行互动模式与经典系统的反馈控制的思路结合, 就形成了平行系统的基本框架. 而对于复杂分布参数系统, 其对应的平行系统的框架, 如图 2 所示:

下面针对分布参数系统从人工系统的建模、计算实验和平行控制 3 个方法展开分析.
3.1 人工分布参数系统的建模
通过对实际分布参数系统的分析, 基于传统的 建模方法进行建模. 常用的建模方法有: 哈密顿原 理、牛顿 - 欧拉法、拉格朗日方程、凯恩方程、假设 模态法、有限元法、有限差分法、集总参数法等. 通 过这些传统的建模方法, 得到近似的模型, 然后对其 可信度进行验证. 人工分布参数模型的建立不需要 逼近实际的物理模型, 而是作为实际模型的可能演 变形式之一. 传统的建模方法只能描述近似的、理想 的或者某一种情况下的模型, 而在人工系统中, 能够 对各种合理场景、数据的构建来模拟各种状况. 如果 考虑涉及人的复杂的系统, 可以采用代理编程等于 段进行建模.
人工分布参数系统的建模主要由 3 部分组成: 数据采集系统、仿真系统和修正系统. 数据采集系 统可以获取一些必要的系统状态和环境信息等. 仿 真系统能够在各个时间段对实际情况进行仿真验证. 修正系统是针对仿真系统和实际系统之间的差异, 进行实时的调节.
3.2 基于人工分布参数系统的计算实验
人工分布参数系统构建之后, 将此系统与实际 的分布参数系统进行实时的平行互动, 然后对各种 场景和产生的各种算法进行测试, 对其效果进行评下面针对分布参数系统从人工系统的建模、计算实验和平行控制 3 个方法展开分析.
3.1 人工分布参数系统的建模
通过对实际分布参数系统的分析, 基于传统的 建模方法进行建模. 常用的建模方法有: 哈密顿原 理、牛顿 - 欧拉法、拉格朗日方程、凯恩方程、假设模态法、有限元法、有限差分法、集总参数法等. 通 过这些传统的建模方法, 得到近似的模型, 然后对其 可信度进行验证. 人工分布参数模型的建立不需要 逼近实际的物理模型, 而是作为实际模型的可能演 变形式之一. 传统的建模方法只能描述近似的、理想 的或者某一种情况下的模型, 而在人工系统中, 能够 对各种合理场景、数据的构建来模拟各种状况. 如果 考虑涉及人的复杂的系统, 可以采用代理编程等于段进行建模.
人工分布参数系统的建模主要由 3 部分组成: 数据采集系统、仿真系统和修正系统. 数据采集系 统可以获取一些必要的系统状态和环境信息等. 仿 真系统能够在各个时间段对实际情况进行仿真验证. 修正系统是针对仿真系统和实际系统之间的差异, 进行实时的调节.
3.2 基于人工分布参数系统的计算实验
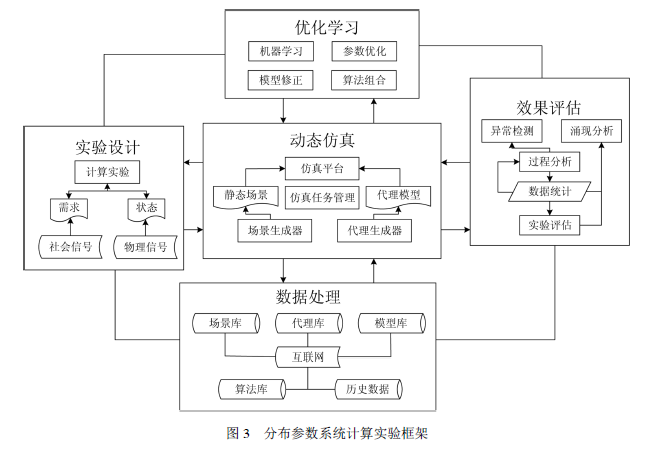
人工分布参数系统构建之后, 将此系统与实际 的分布参数系统进行实时的平行互动, 然后对各种 场景和产生的各种算法进行测试, 对其效果进行评估. 计算实验包含实验设计、优化学习、动态仿真、
效果评估和数据处理 5 个模块. 通过模块的交互作 用, 对人工系统进行试验和实验, 对复杂系统进行预 测和分析. 计算实验的框架如图 3 所示.
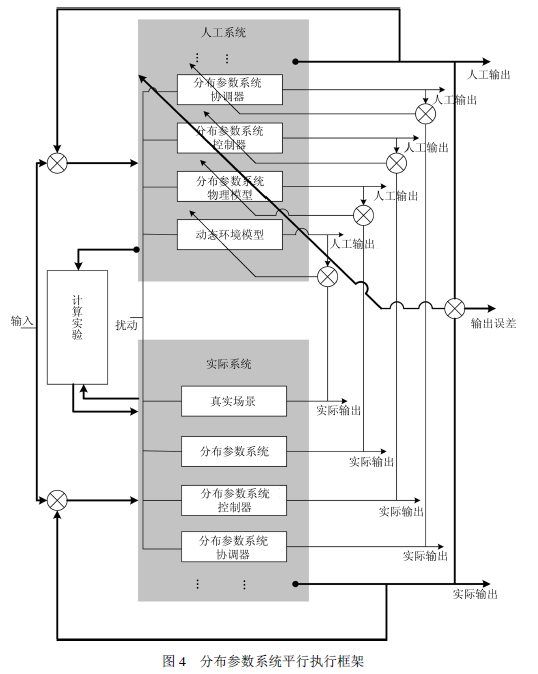
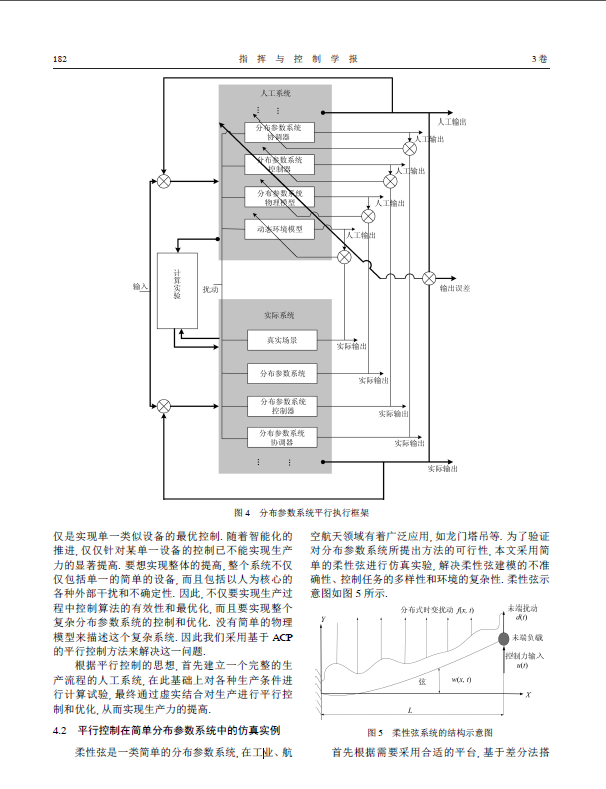
3.3 平行执行
在人工系统和计算实验的基础上通过平行系统的方法, 以平行执行的方式实现对复杂系统的控制 与管理. 平行执行分为整体执行、局部执行和混合执行 3 种. 考虑到分布参数系统既涉及对某个具体对象的控制如柔性结构、某一具体化工过程等, 又涉及对于整个复杂系统例如包含人操作的或者复杂环境 中的复杂系统等, 因此我们采用混合平行执行方式. 平行执行的框架如图 4 所示. 通过观察比较实际系 统与人工系统的评估状态之间的不同, 产生误差反 馈信号, 对人工系统的评估方式或者参数进行修正, 减少差别, 并进行分析新一轮的优化和评估. 最终使实际系统趋近于理想的人工系统, 满足实际输出需求和系统目标.
相较于经典的控制方法, 对于分布参数系统来说, 平行控制的特色与基础就是以数据为驱动, 而不是以模型为驱动, 尤其是以 Web 和 Cyberspace 实时 海量数据为驱动的属性. 从分布参数系统的平行控制框图来看, 系统主要可以分为操作单元和平行执行单元, 操作单元为学习与培训、实验与培训、控制与管理, 平行执行单元为物理分布参数系统和人工分布参数系统的交互.
4 平行控制实例
4.1 平行控制在复杂分布参数系统中的应用
4.1.1 龙门起重机的振动控制
龙门起重机在移动过程中或在受到外部干扰等 情况下都会产生强烈振动. 如不采取抑制振动的有 效措施, 很容易号起疲劳损坏等问题. 而对龙门吊的 研究目前存在以下几个问题: 基于理性条件下的建 模不准确; 系统对于外部干扰和负载质量变化等的 鲁棒性难以确定; 振动抑制和塔吊位置跟踪的协同 控制; 尤其在人参与控制运行时的建模和控制问题. 这些问题正是复杂系统所面临的不确定性、多样性、 复杂性问题, 所以, 我们采用平行控制方法来解决龙 门起重机的控制器设计问题.
平行控制结合了实际系统和人工数值系统, 通过人工系统和实际系统的合理交互, 自适应动态规 划方法使控制器得到学习和优化, 实现龙门起重机 的期望控制效果.
在此过程中首先要实现龙门起重机的仿真建模. 只有确保了系统在仿真过程中与实际系统具有一致 性. 目前所采用的仿真模型是基于近似理想模型, 对 于系统的外部干扰、负载变化、人为控制等情况难 以体现. 因此, 通过计算实验方法, 在人工系统和实际系统交互过程中, 对各种情况进行测试, 然后对效 果进行评估. 进而通过平行执行进行相应控制. 值得 一提的是, 通过计算实验调节与优化的过程中, 需要 人工系统和实际系统的实时交互, 即需要对实际系 统的状态进行测量, 但是分布状态无法全部观测. 因 此, 可以尝试采用深度学习等状态特征的提取手段 或其他数据驱动.
4.1.2 多智能体的协同控制
以多航行体为例的多智能体在实现作战、监视 系统、危险品处理、空间探测等任务时, 必须实现多航行体的各种协同控制功能, 包括编队控制、任务和角色分配、控制交通管制等. 而多航行体的协同控制 依然存在着很多挑战, 比如个体之间的通信带宽和连接能力有限; 信息交换的可靠性和通信个体的选择; 编队的任务目标和个体的目标的协同处理; 某个个体的系统故障等问题. 这些问题使得多航行体系 统是复杂的分布参数系统. 基于 ACP 的平行控制方法提供了解决方案.
同样的, 首先构造实际系统与人工系统互动的平行系统, 通过计算实验使实际系统趋向于期望的人工系统, 通过人工系统简化复杂的系统, 进而实现 复杂系统的优化与控制, 也就是多航行体系统的编队控制与任务规划.
基于平行控制的多航行体的协同控制, 由于是 实际系统与人工系统的通讯, 避免了实际航行体个 体之间的通讯, 同时可以保证通信带宽, 减少冲突和 无人机控制权的切换, 解决了多无人机通信问题. 其 次, 基于平行系统, 可以简化多航行体的个体管理与 任务分配. 基于数据驱动的平行控制方案, 还可以节 省传感器和简化通讯设备的布局, 节约成本. 同时通 过在人工系统中的传感器数据融合, 可以更方便地 实现地图构建、路径规划、目标跟踪等任务. 最后, 通 过对任务的优化分配, 实现在个体出现故障时保证 整个系统的鲁棒性和任务的成功实现.
4.1.3 化工过程活塞流反应器 (PFR) 控制
工业生产中, 管式反应器是常用反应器形式, 多用于石油烃类的热裂解反应、低级怪的卤化反应和 氧化反应等. 在实际工业生产中, PFR 中的化学反应 经常伴有热效应, 有些反应的热效应还较大, 而且工业上实现等温操作比较困难. 另外, 化学反应通常要 求温度随着反应进程有一个适当的分布, 以获得较 好的反应效果. 随着反应进行, PFR 中的温度分布会 发生变化; 反过来 PFR 中的温度分布发生变化会影响反应的进行. 因此, 维持非等温 PFR 中的温度分 布, 是获得较好反应效果的前提. 以前, 控制的目标仅仅是实现单一类似设备的最优控制. 随着智能化的 推进, 仅仅针对某单一设备的控制已不能实现生产 力的显著提高. 要想实现整体的提高, 整个系统不仅仅包括单一的简单的设备, 而且包括以人为核心的 各种外部干扰和不确定性. 因此, 不仅要实现生产过 程中控制算法的有效性和最优化, 而且要实现整个 复杂分布参数系统的控制和优化. 没有简单的物理 模型来描述这个复杂系统. 因此我们采用基于 ACP 的平行控制方法来解决这一问题.
根据平行控制的思想, 首先建立一个完整的生产流程的人工系统, 在此基础上对各种生产条件进行计算试验, 最终通过虚实结合对生产进行平行控制和优化, 从而实现生产力的提高.
4.2 平行控制在简单分布参数系统中的仿真实例
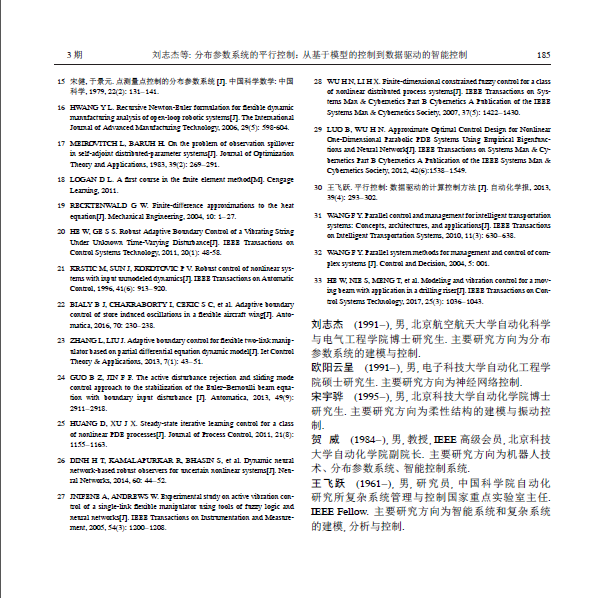
柔性弦是一类简单的分布参数系统, 在工业、航空航天领域有着广泛应用, 如龙门塔吊等. 为了验证对分布参数系统所提出方法的可行性, 本文采用简 单的柔性弦进行仿真实验, 解决柔性弦建模的不准 确性、控制任务的多样性和环境的复杂性. 柔性弦示意图如图 5 所示.

首先根据需要采用合适的平台, 基于差分法搭建柔性弦的人工系统, 然后与实际的柔性弦构造成简单的平行柔性弦系统.
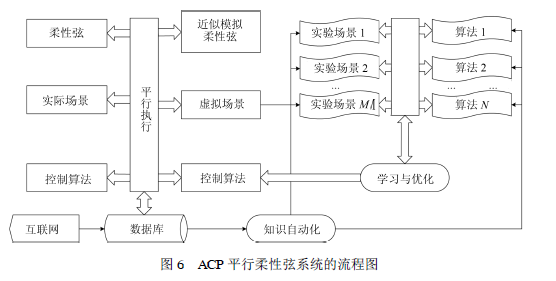
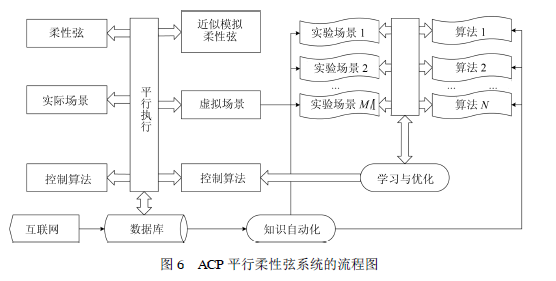
图 6 为基于 ACP 平行柔性弦系统的流程图, 平行柔性弦系统包括实际柔性弦、人工系统两个核心 部分, 计算实验与平行执行两个主要流程, 与学习与优化、知识自动化两个功能模块. 实际柔性弦系统包括柔性弦、执行机构和传感器等构成; 人工柔性弦系统由近似的柔性弦模型构建的人工环境, 根据外部传感器数据结合数据库中的场景生成创建. 计算实验根据图 3 的框架, 通过各模块的相互作用, 得到实 验结果.
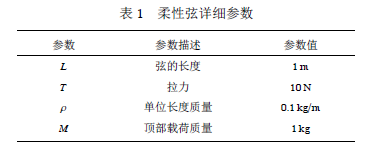
在本实例中采用柔性弦参数如表 1 所示, 通过改变分布时变扰动 f (x, t)、边界扰动 d(t) 等简单的实现不同的场景切换.
选用不同正选函数描述控制器上的外界环境干扰 d(t) 为
d(t) = 10 + sin(0.1t) + 3 sin(0.3t) + 5 sin(0.5t) (1)
d(t) = 10 + cos(0.1t) + 3 cos(0.3t) + 5 cos(0.5t) (2)
d(t) = 10 + 5 sin(0.5t) + 6 sin(0.6t) + 7 sin(0.7t) (3)
d(t) = 10 + 5 cos(0.5t) + 6 cos(0.6t) + 7 cos(0.7t) (4)
同正选函数描述控制器上的分布式时变扰动
f (x, t) 为
f (x, t) = [3 + sin(πxt) + sin(2πxt) + sin(3πxt)]x/100 (5)
f (x, t) = [3 + sin(πxt) + sin(4πxt)]x/100 (6)
f (x, t) = [3 + sin(0.2πxt) + sin(πxt) + sin(4πxt)]x/100 (7)
f (x, t) = [3 + sin(πxt) + sin(4πxt) + sin(7πxt)]x/100 (8)
选择对应的分布式时变扰动 f (x, t)、边界扰动 d(t) 得到 4 种不同场景图 7(a) ∼ (d), 可以得到 4 组人工环境下的效果图, 如图 7 所示:
在计算实验过程中通过选择不同的场景得到各种条件下的数据, 在此基础上实现柔性弦的数据驱 动平行控制.
5 总结
针对传统分布参数系统理论存在的一系列问题, 本文提出以大数据与计算等技术为背景, 基于先进的大型计算的控制理论和方法, 将平行控制的控制思想引入到了分布参数系统的控制中. 平行控制是通过虚实互动的执行方式来完成控制任务的一种控制方法, 其核心是通过人工社会或人工系统对复杂 分布参数系统进行建模, 利用计算实验进行分析和 评估, 最后通过平行执行的方式对分布参数系统实 行控制和管理. 平行分布参数系统可以解决许多传 统分布参数系统无法解决的问题, 但是人工系统的 构建、复杂系统的数据获取等方面存在许多的挑战.
致谢
本文是王飞跃、贺威等在参加 2017 年 IFAC 世界大会的分布参数系统控制分会后,集中讨论所商定的研究课题之初步结果。北京科技大学项韦杰博士和中国科学院大学张杰博士也参加了相关讨论和部分写作工作, 在此特表感谢.
References
1 钱学森. 工程控制论 [M]. 北京:科学出版社,1956.
2 BUTKOVSKII A G, LERNER A Y. On the optimal control of systems with distributed parameters[J]. Automation & Remote Control, 1961, 21(6): 1.
3 WANG P K C. Theory of stability and control for distributed parameter systems (a bibliography)[J]. International Journal of Control, 1968, 7(2): 101−116.
4 LIONS J L. Optimal control of systems governed by partial differential equations problèmes aux limites[J]. Journal of Nuclear Cardiology, 1992, 9(6): 663−7.
5 RAY W H. Some recent applications of distributed parameter systems theory—a survey[J]. Automatica, 1978, 14(3): 281−287.
6 郭宝珠. 分布参数系统控制: 问题, 方法和进展 [J]. 系统科学与数学, 2012, 32(12): 1526−1541.
7 LIU Z, LIU J, HE W. Adaptive boundary control of a flexible manipulator with input saturation[J]. International Journal of Control, 2016, 89(6): 1191−1202.
8 HE W, OUYANG Y, HONG J. Vibration control of a flexible robotic manipulator in the presence of input deadzone[J]. IEEE Transactions on Industrial Informatics, 2017, 13(1): 48−59.
9 WANG F Y, GAO Y. On Frequency Sensitivity and Mode Orthogonality of Flexible Robotic Manipulators. IEEE/CAA Journal of Automatica Sinica, 2016, 3(4), 394-397.
10 HE W, GE S S, HOW B V E, et al. Robust adaptive boundary control of a flexible marine riser with vessel dynamics[J]. Automatica, 2011, 47(4): 722−732.
11 LIU Z, LIU J, HE W. Modeling and vibration control of a flexible aerial refueling hose with variable lengths and input constraint[J]. Automatica, 2017, 77: 302−310.
12 PARANJAPE A A, GUAN J, CHUNG S J, et al. PDE boundary control for flexible articulated wings on a robotic aircraft[J]. IEEE Transactions on Robotics, 2013, 29(3): 625−640.
13 HE W, ZHANG S. Control Design for Nonlinear Flexible Wings of a Robotic Aircraft[J]. IEEE Transactions on Control Systems Technology, 2017, 25(1): 351−357.
14 BALAS M J. Active control of flexible systems[J]. Journal of Optimization theory and Applications, 1978, 25(3): 415-436.
15 宋健, 于景元. 点测量点控制的分布参数系统 [J]. 中国科学数学: 中国科学, 1979, 22(2): 131−141.
16 HWANG Y L. Recursive Newton-Euler formulation for flexible dynamic manufacturing analysis of open-loop robotic systems[J]. The International Journal of Advanced Manufacturing Technology, 2006, 29(5): 598-604.
17 MEIROVITCH L, BARUH H. On the problem of observation spillover in self-adjoint distributed-parameter systems[J]. Journal of Optimization Theory and Applications, 1983, 39(2): 269−291.
18 LOGAN D L. A first course in the finite element method[M]. Cengage Learning, 2011.
19 RECKTENWALD G W. Finite-difference approximations to the heat equation[J]. Mechanical Engineering, 2004, 10: 1−27.
20 HE W, GE S S. Robust Adaptive Boundary Control of a Vibrating String Under Unknown Time-Varying Disturbance[J]. IEEE Transactions on Control Systems Technology, 2011, 20(1): 48-58.
21 KRSTIC M, SUN J, KOKOTOVIC P V. Robust control of nonlinear sys- tems with input unmodeled dynamics[J]. IEEE Transactions on Automatic Control, 1996, 41(6): 913−920.
22 BIALY B J, CHAKRABORTY I, CEKIC S C, et al. Adaptive boundary control of store induced oscillations in a flexible aircraft wing[J]. Automatica, 2016, 70: 230−238.
23 ZHANG L, LIU J. Adaptive boundary control for flexible two-link manipulator based on partial differential equation dynamic model[J]. Iet Control Theory & Applications, 2013, 7(1): 43−51.
24 GUO B Z, JIN F F. The active disturbance rejection and sliding mode control approach to the stabilization of the Euler–Bernoulli beam equation with boundary input disturbance [J]. Automatica, 2013, 49(9): 2911−2918.
25 HUANG D, XU J X. Steady-state iterative learning control for a class of nonlinear PDE processes[J]. Journal of Process Control, 2011, 21(8): 1155−1163.
26 DINH H T, KAMALAPURKAR R, BHASIN S, et al. Dynamic neural network-based robust observers for uncertain nonlinear systems[J]. Neural Networks, 2014, 60: 44−52.
27 JNIFENE A, ANDREWS W. Experimental study on active vibration control of a single-link flexible manipulator using tools of fuzzy logic and neural networks[J]. IEEE Transactions on Instrumentation and Measurement, 2005, 54(3): 1200−1208.
28 WU H N, LI H X. Finite-dimensional constrained fuzzy control for a class of nonlinear distributed process systems[J]. IEEE Transactions on Systems Man & Cybernetics Part B Cybernetics A Publication of the IEEE Systems Man & Cybernetics Society, 2007, 37(5): 1422−1430.
29 LUO B, WU H N. Approximate Optimal Control Design for Nonlinear One-Dimensional Parabolic PDE Systems Using Empirical Eigenfunctions and Neural Network[J]. IEEE Transactions on Systems Man & Cybernetics Part B Cybernetics A Publication of the IEEE Systems Man & Cybernetics Society, 2012, 42(6):1538−1549.
30 王飞跃. 平行控制: 数据驱动的计算控制方法 [J]. 自动化学报, 2013, 39(4): 293−302.
31 WANG F Y. Parallel control and management for intelligent transportation systems: Concepts, architectures, and applications[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 630−638.
32 WANG F Y. Parallel system methods for management and control of complex systems [J]. Control and Decision, 2004, 5: 001.
33 HE W, NIE S, MENG T, et al. Modeling and vibration control for a moving beam with application in a drilling riser[J]. IEEE Transactions on Control Systems Technology, 2017, 25(3): 1036−1043.
刘志杰 (1991−), 男, 北京航空航天大学自动化科学 与电气工程学院博士研究生. 主要研究方向为分布参数系统的建模与控制.
欧阳云呈 (1991−), 男, 电子科技大学自动化工程学院硕士研究生. 主要研究方向为神经网络控制.
宋宇骋 (1995−), 男, 北京科技大学自动化学院博士研究生. 主要研究方向为柔性结构的建模与振动控制.
贺 威 (1984−), 男, 教授, IEEE 高级会员, 北京科技大学自动化学院副院长. 主要研究方向为机器人技术、分布参数系统、智能控制系统.
王 飞 跃 (1961−), 男, 研 究 员, 中国科学院自动化研究所复杂系统管理与控制国家重点实验室主任. IEEE Fellow. 主要研究方向为智能系统和复杂系统的建模, 分析与控制.
后记:本文于2017年9月发表于《指挥与控制学报》第3卷第3期
分布参数系统的平行控制_ 从基于模型的控制到数据驱动的智能控制.pdf




https://m.sciencenet.cn/blog-2374-1127763.html
上一篇:平行增强学习最新理论框架与案例
下一篇:GE最后希望与坚守的启示:从工业智联网到工业5.0